توضیحات
طراحی و شبیه سازی کنترل کننده فازی برای سیستم ترمز ضد قفل فازی
این مقاله در متلب ورژن 2009 شبیه سازی شده و اگر نتایج مشابه مقاله بخواین باید با این ورژن اجرا بشه
با ورژن های دیگر متلب هم قابل اجراست منتهی بخاطر بهینه تر شدن نتایج کمی متفاوت از مقاله خواهد شد
چکیده
سیستم ترمز، یک سیستم شدیداً غیر خطی متغییر با زمان می باشد.
سيستم هاي ضد قفل كنوني نسبت به گذشته از كنترل كننده هاي هوشمندتري، همچون کنترلر فازی برخوردارند.
در اين مقاله طراحي و شبيه سازي يك كنترلر فازي با ورودي لغزش(Slip) و خروجي فشار روغن ترمز براي يك مدل طولي (longitudinal model) براي سيستم ضد قفل انجام شده است.
نتايج شبيه سازي نشان مي دهد كه كنترلر فازي پیشنهادی داراي عملكرد بهتري نسبت به كنترلر بنگ- بنگ مي باشد و ضمن کاهش فاصله توقف، سرعت چرخ بهتر كنترل شده و تغييرات ضريب لغزش در اين نوع كنترل، مينيمال مي باشد.
واژه هاي كليدي : سيستم ترمز ضد قفل ، شبيه سازي، كنترلر بنگ بنگ، كنترلر فازي.
- مقدمه
امروزه ایمنی خودروها از مهمترین مسایل مطرح شده در صنایع خودرو سازی محسوب می شوند.
در سیستم های ترمز معمولی راننده هیچ کنترل دقیقی بر روی فشار ترمز اعمال شده به چرخ ها ندارد و در صورت لغزنده بودن سطح جاده و یا در مواقع ترمز گیری اضطراری، فشرده شدن بیش از حد پدال ترمز توسط راننده سبب شده تا گشتاور ترمز بیش از حد نیاز به چرخ ها اعمال شده و باعث قفل شدن چرخ ها می شود[7].
سیستم ترمز ضد قفل (Anti-lock Braking System)، یک سیستم کنترل الکترونیکی است که فشار روغن را در هنگام ترمز گیری تنظیم می کند و از قفل شدن چرخ و در نتیجه افزایش فاصله توقف خودرو جلوگیری می کند.
اگر چرخ قفل شود، پایداری جانبی و فرمان پذیری خودرو نیز از بین می رود که این امر بسیار خطر آفرین می باشد.
بطور کلی، هدف سیستم ترمز ضد قفل را می توان بیشینه کردن اصطکاک طولی بین تایرها و سطح جاده در نظر گرفت.
مهمترین پارامترهایی که در کیفیت کنترل تأثیر گذارند عبارتند از :
ضریب اصطکاک بین تایر و چرخ، نرخ لغزش چرخ و نیروی عمودی وارد بر چرخ[1].
شیوه های کنترلی گوناگونی برای سیستم ترمز ضد قفل پیشنهاد شده است که می توان از میان آن ها به کنترلگرهای غیرخطی[2]، مقاوم[3]، عصبی [4]، فازی [1,6] و فازی تطبیقی[5] اشاره نمود.
- بررسی دینامیک سیستم
در رابطه (1) مدل ریاضی دینامیک چرخشی چرخ ( 4،…،1 = ) خوردو با فرض نداشتن حرکت های جانبی آن ارائه می شود.
…
که در آن ممان اینرسی چرخ، سرعت زاویه ای چرخ، گشتاور ترمز چرخ ، شعاع موثر گردش چرخ، نیروی اصطکاک چرخ و جاده ، گشتاور موتور روی چرخ که در هنگام ترمز، صفر در نظر گرفته می شود و نیروی اصطکاک چرخ نسبت به محور خود می باشد که بصورت زیر مدل می گردد :
…
در رابطه (2)، ضریب اصطکاک چرخش چرخ است که می تواند تابعی از باشد و نیروی عمودی وارد بر چرخ می باشد.
…
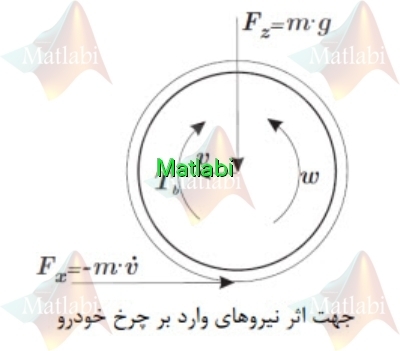
جهت اثر نیروهای وارد بر چرخ در شکل (1) نشان داده شده است.

شکل1- جهت اثر نیروهای وارد بر چرخ خودرو
برای بدست آوردن ضریب لغزش نیز از رابطه (3) استفاده می گردد :
…
که در رابطه فوق سرعت طولی خودرو، سرعت زاویه ای چرخ و شعاع موثر چرخ می باشند.
…
شکل(2) منحنی تغییرات ضریب اصطکاک طولی بین چرخ و جاده های مختلف بر حسب ضریب لغزش () را نشان می دهد که در آن محدوده مطلوب کاری ترمز ضد قفل برای سطوح مختلف نیز مشخص شده است.
…

شکل2-منحنی تغییرات ضریب اصطکاک طولی بین چرخ و جاده بر حسب ضریب لغزش
با توجه به رابطه(3) و شکل(2) می توان نتیجه گرفت که ضریب لغزش صفر درصد حالتی را نشان می دهد که چرخ آزادانه حرکت می کند و با هیچ نوع مقاومتی مواجه نیست و همچنین ضریب لغزش 100 درصد نیز نشان دهنده حالتی است که چرخ کاملاً قفل شده و تایر بر روی سطح جاده بشدت می لغزد.
- طراحی کنترلر سنتّی بنگ- بنگ
در ابتدا به طراحی و شبیه سازی یک کنترلر بنگ بنگ که در حقیقت نوعی کنترلر قطع/ وصل می باشد می پردازیم و نتایج شبیه سازی را در متلب بدست می آوریم تا در مرحله بعد، پس از طراحی کنترلر فازی نتایج شبیه سازی ها را با هم مقایسه کنیم.
در کنترلر بنگ بنگ با توجه به این که قابلیت شناسایی سطوح مختلف و در نتیجه تنظیم مقدار لغزش در نزدیکی قلّه برای سطوح مختلف وجود ندارد لذا مقدار لغزش یک مقدار ثابت باندازه 0.2 است که تقریباً برای تمامی سطوح و بخصوص سطح خشک بیشترین اصطکاک طولی بین تایر و سطح جاده را ایجاد می کند.
کنترلر طراحی شده در محیط متلب ابتدا میزان لغزش چرخ را بعنوان ورودی پذیرفته و با مقدار ثابت مقایسه کرده است.
اگر میزان لغزش ورودی کمتر باشد گشتاور ترمز را افزایش می دهد و برعکس، و همچنین در صورتی که مقدار لغزش ورودی در ناحیه مطلوب مشخص شده شکل(2) باشد گشتاور ترمزی را بدون تغییر در همان مقدار نگاه می دارد.
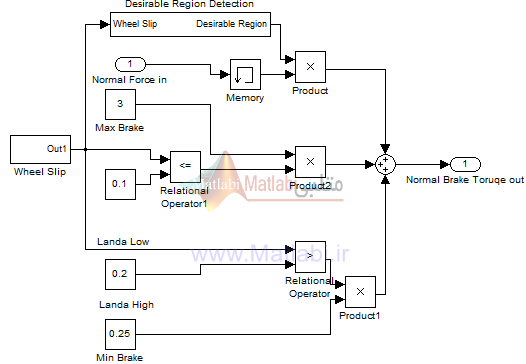
شکل3-کنترلر بنگ بنگ
و نتایج بدست آمده از این شبیه سازی برای کنترل سرعت چرخ وسرعت خودرو، لغزش و فاصله توقف بصورت زیر می باشد.

شکل4-کنترل سرعت چرخ و سرعت خودرو

شکل5-لغزش

شکل6-فاصله توقف
- طراحی کنترلر فازی
در این کنترلر از مدل فازی ممداني جهت استنتاج فازی استفاده می شود.
در این استنتاج فازی از عملگر ضرب و جمع جبری به ترتیب برای اشتراک(T-norm) و اجتماع (S-norm) فازی و از میانگین مراکز بعنوان غیر فازی ساز(Defuzzifier) استفاده شده است.
در کنترلر فازی لغزش کنونی چرخ بعنوان ورودی کنترلر و گشتاور ترمز بعنوان خروجی غیر فازی ساز تعیین شده است و توابع عضویت ورودی و خروجی بترتیب در شکل(7) و شکل(8) نشان داده شده است. 
شکل8- توابع عضویت ورودی
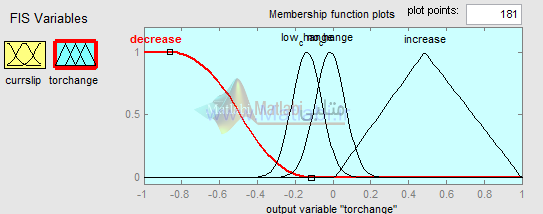
شکل9- توابع عضویت خروجی
لیست قواعد بکار رفته در کنترلر فازی به شرح زیر می باشد:
1.If(CurrSlip is normal) Then (Torchange is no_change)
2.If(CurrSlip is high) Then (Torchange is low_change)
3.If(CurrSlip low) Then (Torchange is increase)
4.If(CurrSlip is very_high) Then (Torchange is decrease)
شبیه سازی در نرم افزار متلب با زمان نمونه برداری 0.1 میلی ثانیه و با استفاده از حل کننده قدم متغیر برای سیستم های پیوسته( Variable Step Continuous Solvers) انجام شده است.
استفاده از این نوع حل کننده این امکان را فراهم می کند که شبیه سازی برای مدلی که تغییرات مقادیر آن سریع است.
با قدم های کوچکتر و در نتیجه دقت بیشتر، و برای مدل هایی که سرعت تغیییرات مقادیر آن کم است، با قدم های بلند تر و در نتیجه سرعت بیشتر اجرا شود.در این شبیه سازی از حل کننده قدم متغیر برای سیستم های پیوسته از نوع ode15s(Stiff) برای شبیه سازی دقیق تر استفاده شده است.
 در شکل(10) بلوک دیاگرام کنترلر فازی سیستم ترمز ضد قفل نمایش داده شده است.
در شکل(10) بلوک دیاگرام کنترلر فازی سیستم ترمز ضد قفل نمایش داده شده است.
شکل10- مدل کامل کنترل فازی سیستم ترمز
ضد قفل
نتایج حاصل از اعمال کنترلر فازی برای کنترل سرعت چرخ و سرعت خودرو، کنترل لغزش و فاصله توقف بصورت زیر می باشد.

شکل11-کنترل سرعت چرخ و سرعت خودرو
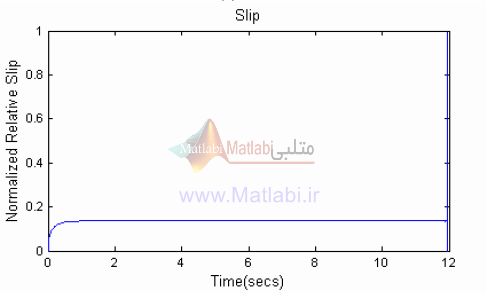
شکل12-لغزش

شکل13- فاصله توقف
5- نتیجه گیری
از مقایسه نتایج بدست آمده از طراحی کنترلر فازی و کنترلر بنگ بنگ مشهود است که کنترلر فازی توانسته لغزش را حول لغزش قلّه نگاه دارد و به همین علت سیستم ترمز ضد قفل با کنترل فازی داری عملکرد بهتری در کنترل سرعت چرخ بوده و همچنین توانسته که تغییرات لغزش را به حداقل برساند و در مقایسه فاصله توقف کنترلر فازی و کنترلر بنگ بنگ که در شکل(14) نشان داده شده است برتری با کنترلر فازی می باشد.
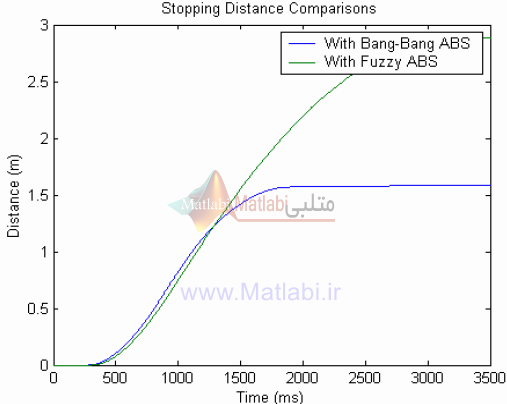
شکل14-مقایسه فاصله توقف کنترلر فازی و بنگ بنگ
کلید واژه : سيستم ترمز ضد قفل , شبيه سازي, كنترلر بنگ بنگ, كنترلر فازي, ABS Braking system , Fuzzy Logic Contoller
شبیه سازی مقاله طراحی و شبیه سازی کنترل کننده فازی برای سیستم ترمز ضد قفل فازی
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.