توضیحات
Vibration control of vehicle active suspension system using a newVibration control of vehicle active suspension system using a new robust neural network control system
ترجمه فارسی موضوع مقاله: کنترل ارتعاش خودرو سیستم تعلیق فعال با استفاده از یک کنترل ارتعاش جدید از خودرو سیستم تعلیق فعال با استفاده از یک سیستم کنترل شبکه های عصبی مقاوم جدید
برای سادگی کار فرض شده معادلات دکوپله شده و 6ورودی 6خروجی هستند
به صورتی که به صورت جداگانه قابل کنترل هستند و از تاثیر حلقه های داخلی صرف نظر شده
اما صحت برنامه:
بعد از اجرا کردن code_1.m به سراغ nnmodel.mdl برید و این سیمولینک را اجرا کنید:
اگر overal1.m را نیز اجرا کنید دیگر نیازی به اجرای سیمولینک نیست چون در خط پایانی برنامه این اتفاق خواهد افتاد:
sim(‘nnmodel’)
در هر صورت نتایجی که برنامه به شما میدهد به این صورت است:
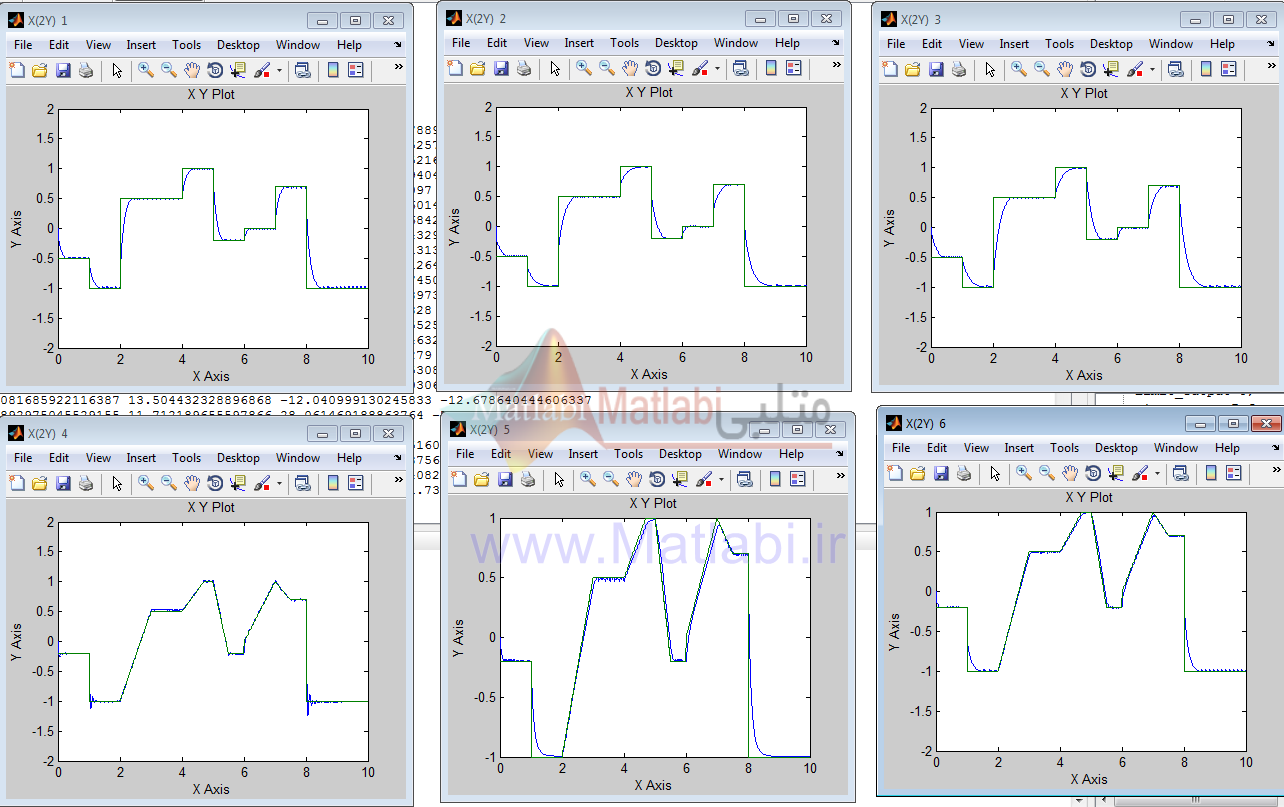
همانطور که میبینید 6ورودی 6خروجی برای اثبات نتایج این مقاله در نظر گرفته شده است.
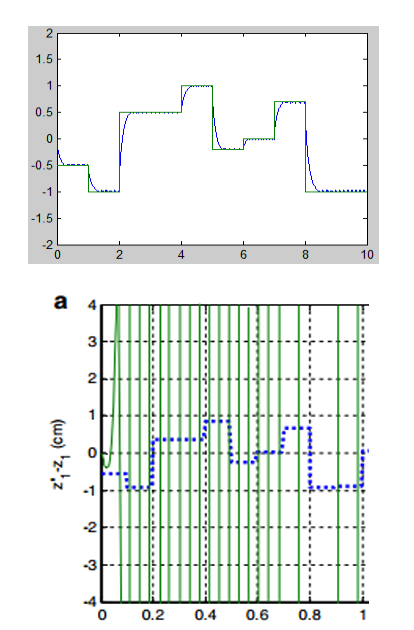
شکل سیگنال اولیه بسته به توابع میتونه هر طوری باشه. اما در اینجا و در شکل 1 دقیقا شکل سیگنال مقاله طراحی شده است:
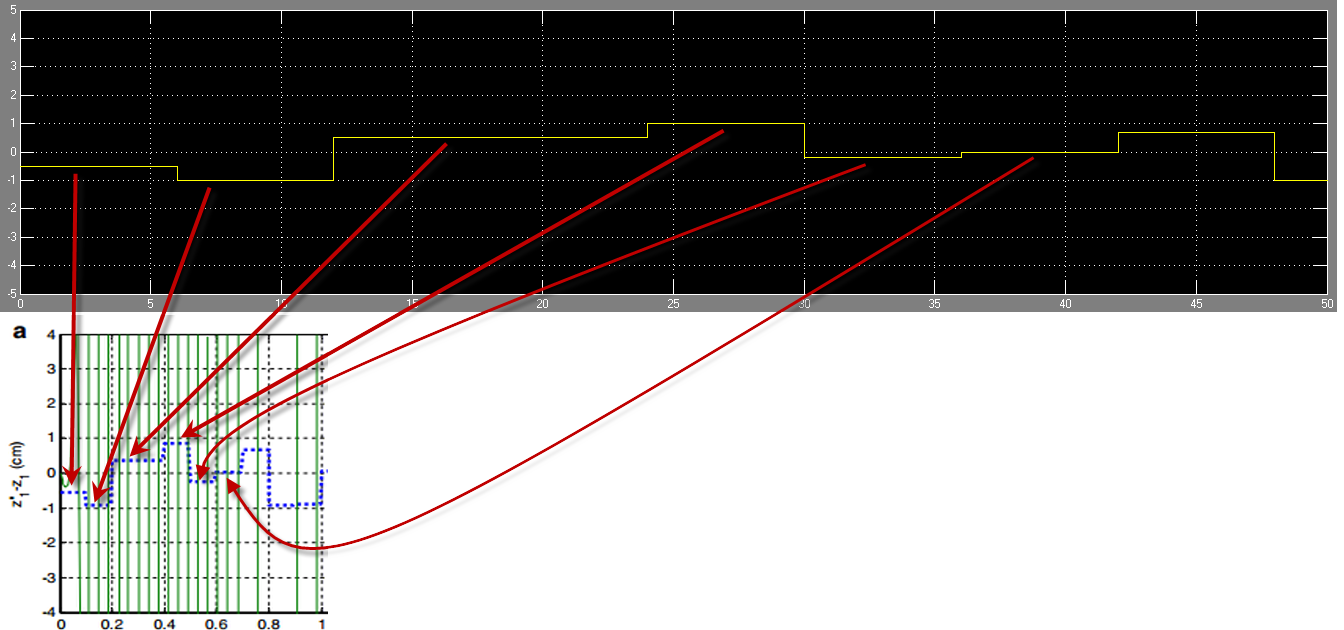
این شکل را با شکل یک نیز مقایسه کنید:
به دلیل استفاده نکردن از تولباکس های آماده ی متلب برای آموزش با شبکه عصبی (که یکی از مزیت های برجسته برای تفهیم استاد مبنی بر درک کامل الگوریتم هوشمند شبکه عصبی است) حجم داده های افزایش پیدا کرده و به مراتب سخت افزار بهتری را طلب میکند. پس نیازی به وجود یک سیگنال طراحی شده ی اولیه با زمان بیشتر نداریم.
همانطور که میبینید شبکه عصبی به خوبی عمل کرده است و با اجرای برنامه ی سیمولینک ،پاسخ را به خوبی دنبال کرده است.
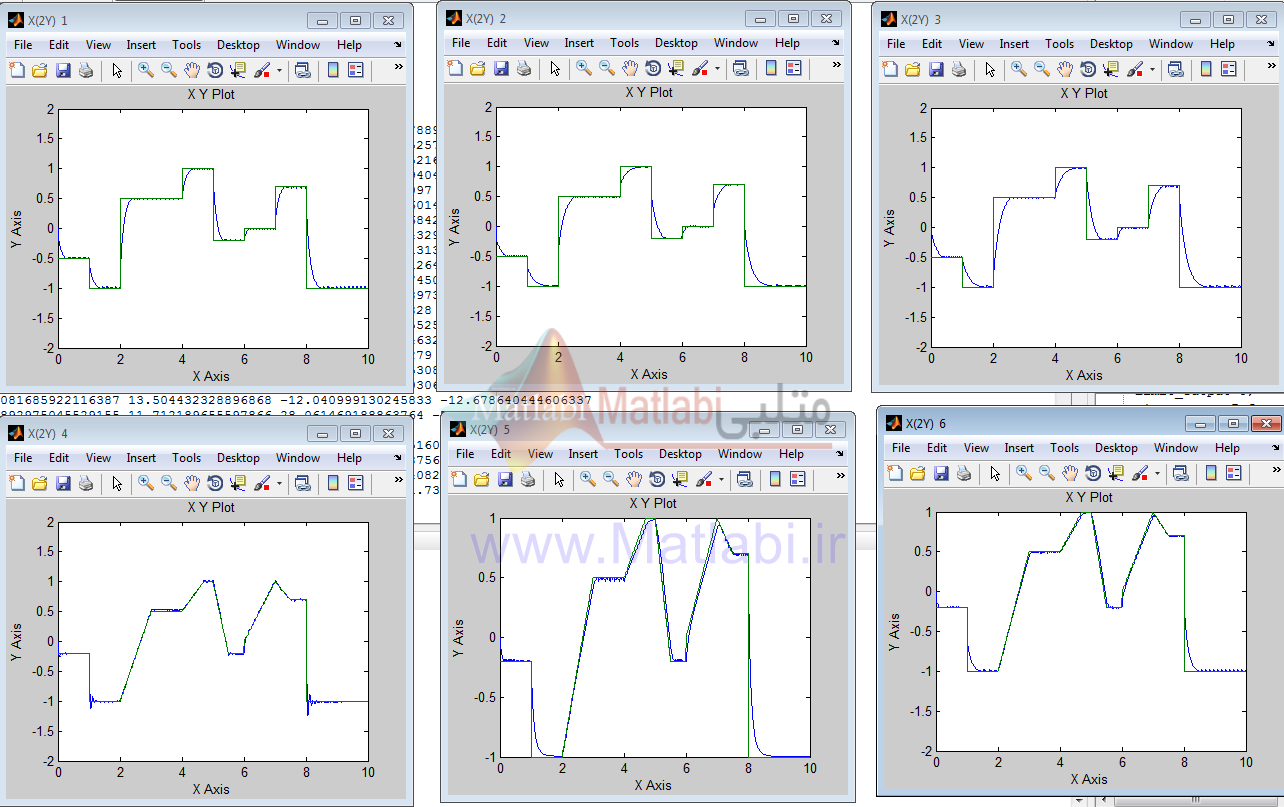
همانطور که میبینید در ورودی های 4و5 و 6 خروجی شبکه عصبی به خوبی نمایان شده است.
مقایسه ی انواع کنترل کننده ها با استفاده از شبکه عصبی:
کنترل کننده ی پیش بین:این کنترلر از یک شبکه ی عصبی برای پیش بینی پاسخ آینده ی دستگاه به ورودی های بالقوه کنترلی استفاده میکند سپس از یک الگوریتم بهینه سازی برای برای محاسبه سیگنال کنترلی برای بهینه سازی پاسخ آینده ی دستگاه استفاده میکند .
شبکه ی عصبی در این مدل به صورت آفلاین آموزش میبیند ولی در نهایت این کترلر به حجم زیای محاسبه ی آنلاین نیاز دارد که به این دلیل که الگوریتم بهینه سازی باید در هر نمونه ی زمانی انجام پذیرد.
NARMA-L2 Control
این کنترلر ساختار ساده ای دارد و بر اساس باز آرایی مدل شبکه عصبی که به صورت آفلاین آموزش میبیند عمل میکند
تنها محاسبه آنلاین این کنترلر گذر رو به جلوی شبکه عصبی در حین کنترل فرایند است .
اشکال این شبکه این است که فرم مدل سیستم باید نزدیک فرم کامپونین باشدیا قابل تخمین با سیستمی باشد که فرم کامپونین دارد.
Model Reference Control
مانند کنترلر قبلی تنها محاسبات آنلاین آن مینیمم است هرچند بر خلاف کنترلر قبلی این کنترلر به یک شبکه ی عصبی که به صورت آفلاین آموزش دیده است نیز نیاز دارد.
هزینه ی محاسباتی آموزش این شبکه زیاد است چون از الگوریتم پس انتشار خطا استفاده میکند .
ولی مزیت این شبکه این است که برای سیستم های با تنوع بیشتر نسبت به کنترلر قبل کاربرد دارد .
NARMA-L2 (Feedback Linearization) Control
این کنترلر با دو نام شناخت میشود NARMA-L2 و کنترلر خطی سازی فیدبک
در صورتی که سیستم مورد نظر به فرم کاپونین باشد از آن به عنوان کنترلر خطی سازفیدبک یاد میشود و اگر از تقریب سیستم استفاده شود به آن NARMA-L2 یاد میشود
ایده ی اصلی این کنترلر این است که دینامیک سیستم غیر خطی را با حذف عوامل غیر خطی آن به یک سیستم خطی تبدیل کنیم.
اولین گام برای استفاذه از این سیستم این است که مدل فرایند مورد مطالعه استخراج شود و شبکه ی عصبی آموزش ببیند تا دینامیک پیش رو سیستم را ارائه کند یک مدل استاندارد که برای ارائه ی مدل شبکه های غیر خطی زمان گسسته استفاده میشود مدل NARMA h که با معادله ی زیر ارائه میشود:
…
در فاز شناسای سیستم باید شبکه ی عصبی با داده های مطلوب آموزش داده شود تا تابع N تقریب بزند .
اگر بخواهیم خروجی یک مقدار مرجع را تعقیب کند قد بعدی این است که کنترلر را به صورت زیر طراحی کنیم
….
مشکل استفاده از این کنترلر این است که اگر بخواهیم یک شبکه ی عصبی را آموزش دهیم تا تابع G را تقریب بزند و مربع خطا را مینیمم کند باید از الگوریتم پس انتشار خطا استفاده کنیم که سرعت کنترل کاملا پایین می اید .
یک راه حل برای این مشکل این است که از تقریب سیستم به صورت زیر استفاده کنیم
…
مزیت این روش این است که میتوان سیگنال کنترلی پیدا کرد که نتیجه ی زیر حاصل شود:
…
نتیجه ی بدست آمده برای سیگنال کنترلی به صورت زیر است :
![]()
![]()
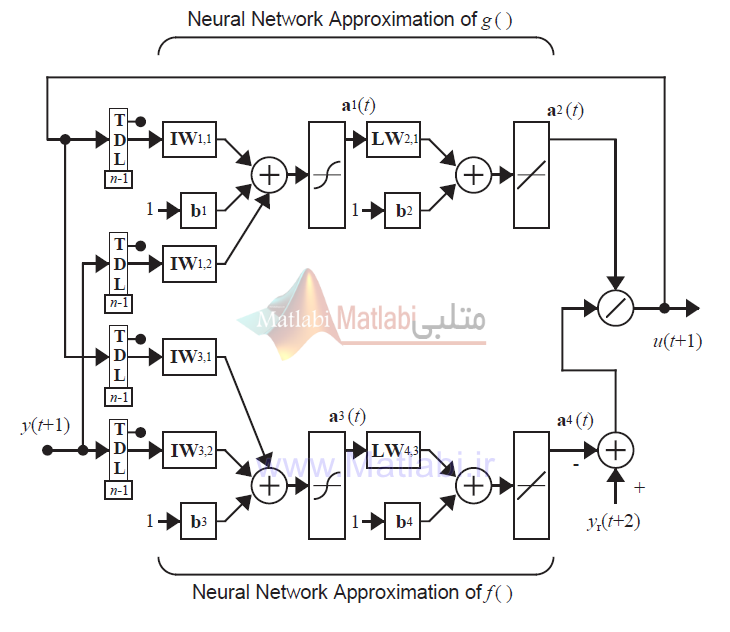
ساختار شبکه ی عصبی در نمودار زیر نشان داده شده است:
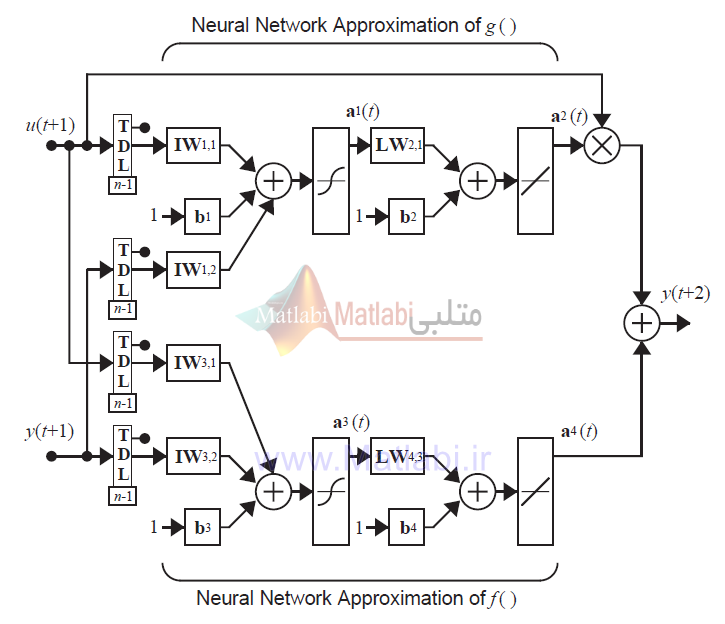
در نهایت معادله مورد استفاده به صورت زیر است:
![]()
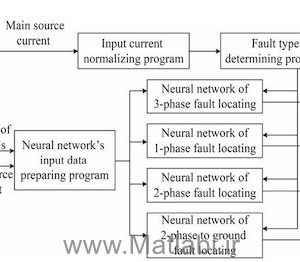
دیاگرام بلوکی فرایند کنترل در شکل زیر نمایش داده میشود: 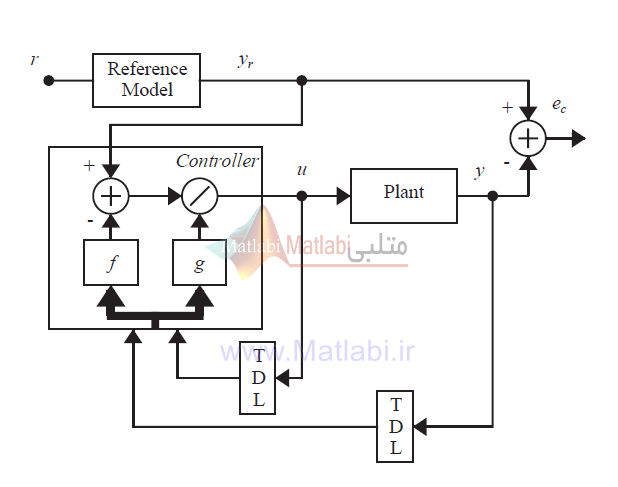
- انجام پروژه شبکه عصبی با متلبی
کنترل مقاوم، سیستم تعلیق، شبکه عصبی PID controller, Neural networks, Whole vehicle’s suspension, Robust controller
شبیه سازی مقاله Vibration control of vehicle active suspension system using a newVibration control of vehicle active suspension system using a new robust neural network control system
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.