توضیحات
استفاده از کنترل پیشبینی مدل محدود برای کنترل دو کوادروتور که یک محموله معلق با کابل را حمل میکنند
عنوان اصلی مقاله:
Using Constrained Model Predictive Control to Control Two Quadrotors Transporting a Cable-Suspended Payload
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش 7 صفحه ای در قالب ورد است.
ترجمه چکیده مقاله:
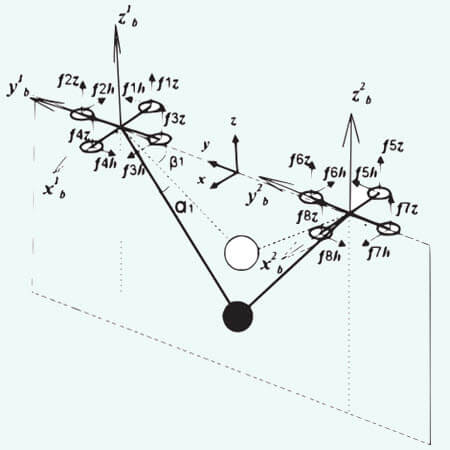
این مقاله از یک کنترل کننده MPC محدود برای کنترل دو کوادروتور که یک محموله معلق کابلی را با هم حمل می کنند، استفاده می کند.
دینامیک سیستم از معادله اویلر-لاگرانژ به دست آمده است. با توجه به پیچیدگی دینامیک، یک کنترلکننده MPC خطی برای یک کار کنترلی استفاده میشود، که محموله را برای ردیابی یک مسیر مورد نظر در حالی که دو کوادروتور را تثبیت میکند، بکار میبرد.
محدودیتها در سیگنالهای کنترل کوادروتور و موقعیتهای بار در نظر گرفته میشوند. کنترل کننده محدود می تواند برای سیستم های کنترل عملی مفید باشد. نتایج شبیه سازی برای ارزیابی عملکرد کنترل در برابر یک کنترل کننده LQR ارائه شده است.
توضیحات پروژه کنترل پیش بین
فایل های پروژه به صورت مشخص در پوشه های مرتبط قرار گرفته اند. در پوشه simulation چهار فايل به صورت زير وجود دارد:
فايل run_mpc1 براي شبيه سازي MPC با مسير مرجع دايره
فايل run_mpc2 براي شبيه سازي MPC با مسير مرجع 8
فايل run_lqr1 براي شبيه سازي LQR با مسير مرجع دايره
فايل run_lqr2 براي شبيه سازي LQR با مسير مرجع 8
بخشی از گزارش و فرضیات در نظر گرفته را در اینجا آورده ایم:
خطوط 7 تا 25: در این خطوط مدل فضای حالت سیستم طبق معادله 9 ساخته می شود. دقت کنید که مقاله هیچ اشاره ای به ماتریس های سیستم نکرده است و در هیچ مرجعی هم نتوانستم مقدار این ماتریسها را بیابم. در نتیجه یک سری ماتریس های فرضی قرار دادم که بتوان نتایجی بسیار نزدیک به مقاله گرفت.
خط 28: زمان نمونه برداری سیستم طبق مقاله وارد شده است.
خط 29: مدل MPC خطی با استفاده از جعبه ابزار متلب ساخته شده است. این مدل دقیقا همانی است که مقاله به آن اشاره نموده و دو ورودی quad که فرم فضای حالت سیستم و Ts که زمان نمونه برداری است را می گیرد.
خط 32: افق پیش بین طبق توضیحات مقاله وارد شده است.
خط 35: مقدار مینیمم xp طبق صفحه 231 مقاله وارد شده است. یک اشتباه عجیب مقاله این است که نوشته xk<=-0.5 در حالی که در نمودارهای خود مقاله x بزرگتر از 0.5 است و در نتیجه باید علامت >= باشد.
خطوط 74 تا انتها: رسم نمودارها.
در بالا فقط بخشی از توضیحات و مفروضات آورده شده.
با اجرای شبیه سازی نمودارهای زیر حاصل می شود. ملاحظه می گردد که شباهت زیادی بین نمودارهای به دست آمده و مقاله وجود دارد و برخی تفاوت ها هم به دلیل توضیحات ناقص مقاله می باشد.
نتایج شبیه سازی با متلب
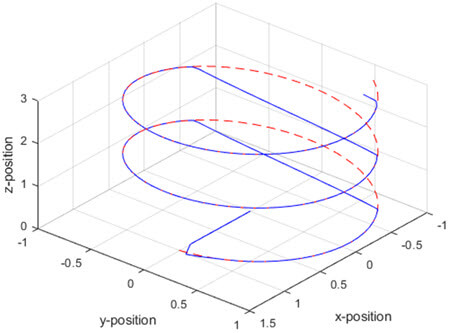
Fig. 2: 3D load position using the constrained MPC controller

Fig. 7: The payload position using the MPC controller
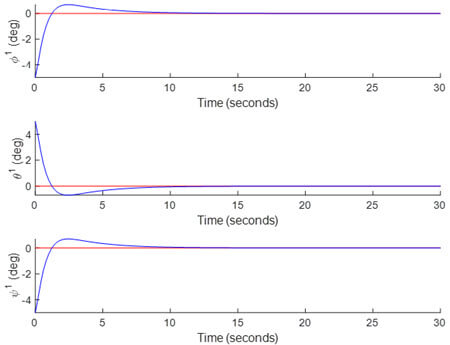
Fig. 9: The Eular angles of the first quadrotor using the MPC controller

Fig. 4: The angular velocities of the first quadrotor using MPC controller
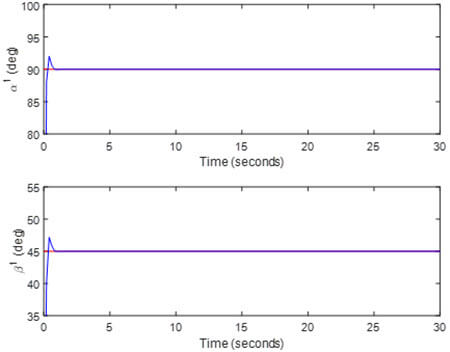
Fig. 5: The rope angles with the first quadrotor using the MPC controller
فایل run_mpc2
تمام قسمت ها مشابه قبل است فقط در خطوط 58 و 59 به جای مسیر مرجع دایروی مسیر شکل 8 ساخته می شود.
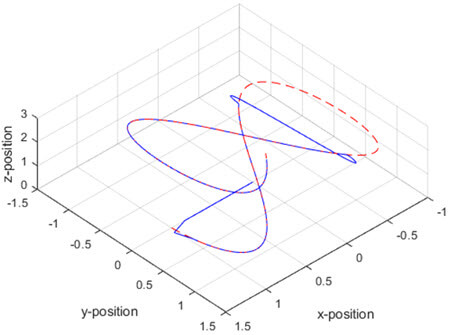
Fig. 11: 3D load position using the constrained MPC controller
فایل run_lqr1
دقت کنید که مقاله در مورد کنترلر LQR هیچ توضیحی نداده است و بنده به صورت سعی و خطا این بخش شبیه سازی شده است البته نتایج قابل قبولی به دست آمده اند ولی تفاوت هایی نیز دارند.
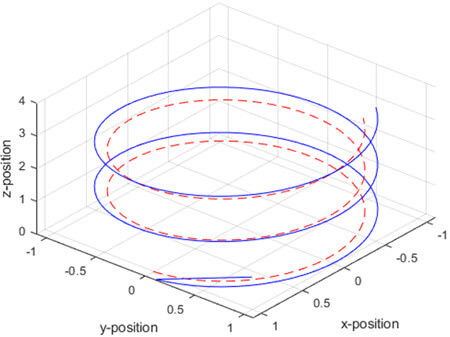
Fig. 3: 3D load position using the LQR controller with the control limitation
فایل run_lqr2: تنها تفاوت در خطوط 37 و 38 می باشد که مسیر مرجع شکل 8 تولید می شود.
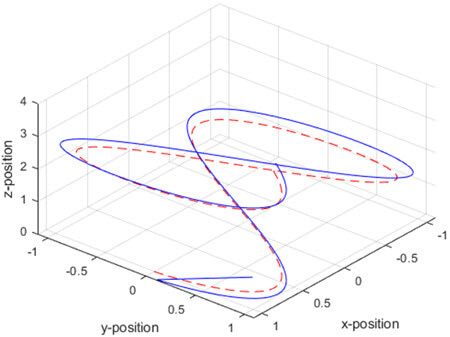
Fig. 12: 3D load position using the constrained LQR controller
شاید به موارد زیر نیز علاقه مند باشید:
- حمل و نقل بار مشارکتی با دو کوادروتور با استفاده از کنترل تطبیقی
- الگوریتم بهینه سازی ازدحام ذرات (PSO)
- مدلسازی و کنترل تطبیقی کوادروتور
- Robust MPC Tower Damping for Variable Speed Wind Turbines
- کنترل مشارکتی بهینه داده محور برای تیم کوادروتور با داینامیک ناشناخته
کلیدواژه:
MPC,LQR
کنترل پیش بین
استفاده از کنترل پیشبین مدل محدود برای کنترل دو کوادروتور که یک محموله معلق با کابل را حمل میکنند با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.