توضیحات
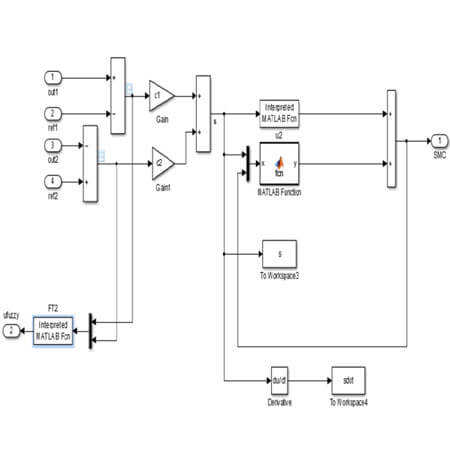
TWO LINK ROBOT CONTROLLERS BASED ON FUZZY TYPE-2 AND HIGHER ORDER SLIDING MODE
سیستم فازی نوع-2 از کاهنده مرتبه مرکز مجموع ها (Center Of Set ) و الگوریتم KM
در این پروژه برای سیستم فازی نوع-2 از کاهنده مرتبه مرکز مجموع ها (Center Of Set ) و الگوریتم KM استفاده شده است.
الگوریتم KM با استفاده از برنامه زیر کران بالا و کران پایین توابع عضویت بخش مقدم و نقطه انتهایی سمت چپ و راست بخش تالی سیستم فازی را به عنوان ورودی دریافت و نقطه انتهایی سمت چپ و راست به ازائ ورودی به سیستم فازی را محاسبه می نماید:
function [YL,YR]=COS_TR(fl,fu,tl,tr)
zl=(fu+fl)/2;
zr=(fu+fl)/2;
YL=0;YR=0;
L=length(tl);
for i=1:1:L
YL=zl*tl’/sum(zl);
for j=1:L
if tl(j)<=YL
zl(j)=fu(j);
…
با اجرای robot_2DOF_IT2FLC_NotOptim.mdl برنامه بدون بهینه سازی پارامترها اجرا شده و با اجرای تابع ica.m برنامه بهینه سازی شروع شده و پارامترهای robot_2DOF_IT2FLC.mdl شامل ضرایب ورودی، مراکز و واریانس و کران بالا و پایین توابع عضویت فازی نوع-2 بهینه سازی می شوند.
نکته : استفاده از کاهنده مرتبه بدلیل حجم محاسبات بالاتر نیازمند صرف زمان بیشتری برای شبیه سازی می باشد.
بعد از اتمام شبیه سازی نتایج بدست آمده شامل خروجی و توابع عضویت فازی نوع-2 بهینه شده ترسیم می شوند.
این برنامه به متلب 2012b و ویندوز 32 بیتی نیاز دارد.
کلید واژه : فازی, ربات دو درجه آزادی, پروژه متلب, پروژه matlab , شبیه سازی با متلب
2-Link Robot, Higher Order Sliding Mode,Type-2 Fuzzy
شبیه سازی
TWO LINK ROBOT CONTROLLERS BASED ON FUZZY TYPE-2 AND HIGHER ORDER SLIDING MODE
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.