توضیحات
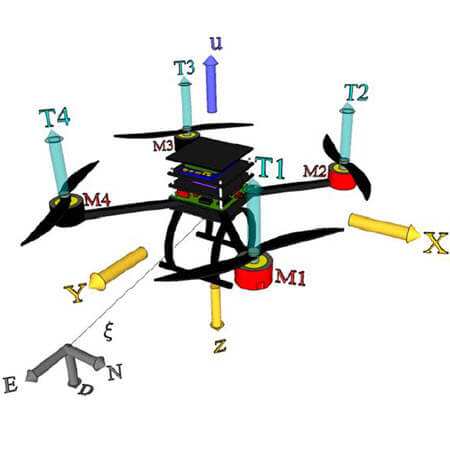
Tuning of PID Controllers for Quadcopter System using Hybrid Memory based Gravitational Search Algorithm – Particle Swarm Optimization
شبیه سازی مقاله با الگوریتم GWPSO و PSO انجام شده است.
شبیه سازی در محیط ام فایل و سیمولینک متلب انجام شده است.
دارای گزارش مختصر در حدود چند خط توضیح و در ادامه نمایش نتایج شبیه سازی در قالب ورد است.
توضیحات پروژه
شبیه سازی در محیط متلب 2019b تهیه شده است.
در این پروژه به شبیه سازی روش ارائه شده در مقاله با بهینه GWOPSO و PSO پرداخته شده است.
برای اجرای این پروژه فقط کافیست فایل main.m را اجرا کنید.
در خط 23 روش GWOPSO فراخوانی می شود.
در فایل cost function، تابع هزینه توضیح داده شده در مقاله نوشته شده است. در این فایل، مدل سیمولینک پیوسته فراخوانی میشود و ضرایب 6 کنترلر PID بهینه میگردند.
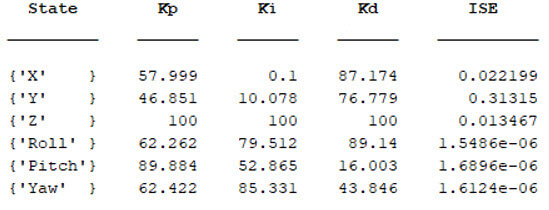
پس از اتمام شبیه سازی نتایج بهترین پاسخ حاصل از GWOPSO نمایش داده میشوند.
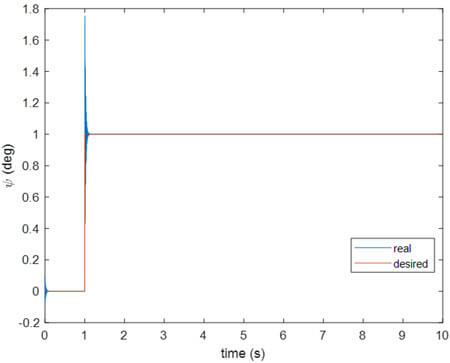
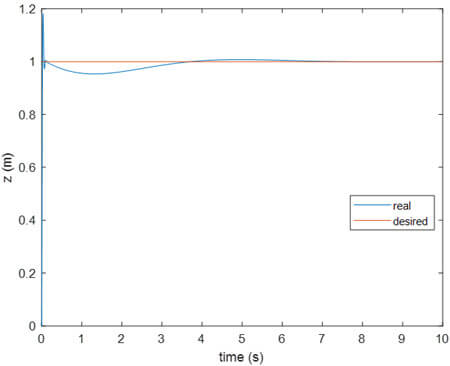
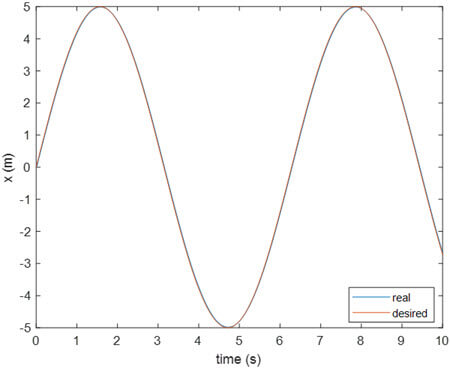
در اینجا نتایج حاصل از روش GWOPSO را نمایش میدهیم:
مشاهده میشود هر 6 پارامتر به خوبی مسیر مرجع خود را تعقیب نموده اند و نمودارها شباهت زیادی به مقاله دارد.



کلیدواژه:
Optimization Algorithm, gravitational search algorithm, Hybrid memory based gravitation search algorithm, Quadcopter control, PID tuning, heuristic optimization algorithm.
Quadcopter, PID, UAV, Flying robot, GSA, MBGSA-PSO
شبیه سازی
Tuning of PID Controllers for Quadcopter System using Hybrid Memory based Gravitational Search Algorithm – Particle Swarm Optimization
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.