
توضیحات
Tracking Control of an Inverted Pendulum Using Computed Feedback Linearization Technique
شبیه سازی مقاله در محیط متلب انجام شده است و مود لغزشی نیز به آن اضافه شده است.
دارای گزارش ورد 10 صفحه ای در قالب ورد است.
توضیحات پروژه
سه مدل سیمولینک با بلوک ساخته شده است.
برای اجرای شبیه سازی ها فایل main فقط باید اجرا شود و حتما گزینه Change Folder را انتخاب کنید تا هر سه مدل سیمولینک به ترتیب اجرا شوند.
سه مدل به ترتیب مربوط به موارد زیر هستند:
- کنترلر LQG در بخش III مقاله
- کنترلر خطی سازی فیدبک در بخش IV مقاله
- کنترلر مود لغزشی
معادلات مربوط به کنترلر مود لغزشی در گزارشی جداگانه با نام مود لغزشی آورده شده اند.
تمام شبیه سازی ها فقط با بلوک است و کاملا منطبق بر فرمول های مقاله می باشند. در نتیجه به راحتی قابل فهم هستند. هم چنین شبیه سازی قسمت بندی شده است و عنوان هر قسمت نوشته شده است.
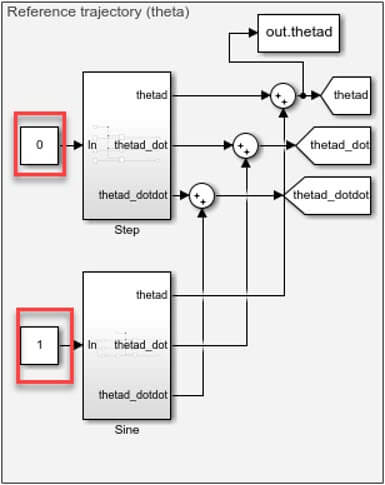
در شبیه سازی های 2 و 3 در قسمت مسیر مرجع مربوط به زاویه تتا که در شکل زیر نشان داده شده است، اگر ضریب بالا برابر 1 و پایین برابر 0 باشد، مسیر مرجع پله و اگر بالا برابر 0 و پایین 1 باشد، مسیر مرجع سینوسی خواهد بود. این تغییر را کاربر باید ایجاد نماید.
نتایج
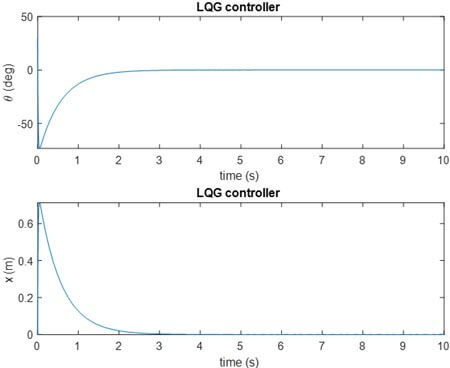
کنترلر LQG
این کنترلر فقط می تواند سیستم را به مبدا بیاورد که در شکل های زیر به خوبی نشان داده شده است (این نمودارها اضافه بر مقاله رسم شده اند):

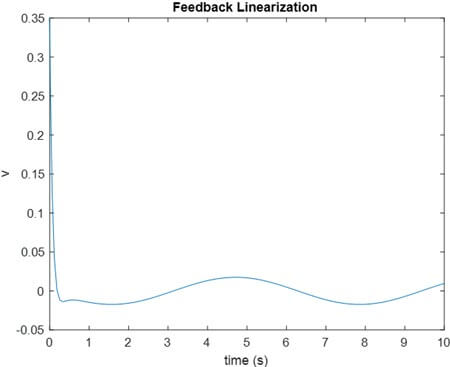
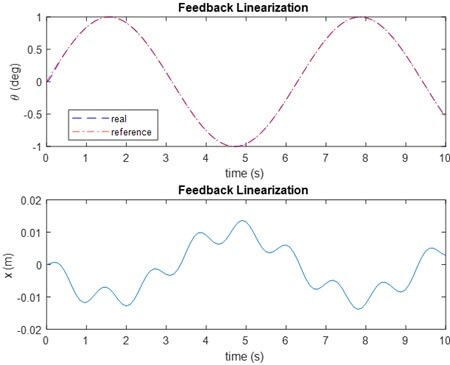
خطی سازی فیدبک
ملاحظه می شود به خوبی مسیر مرجع تعقیب شده است (همانند مقاله):
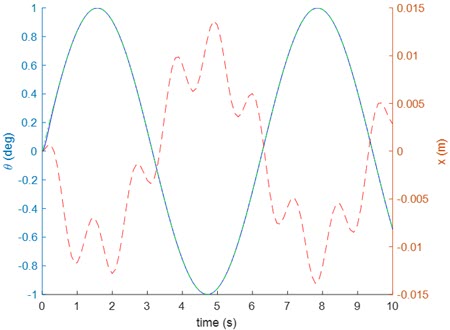
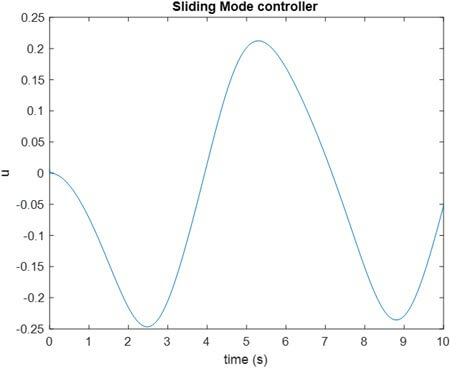
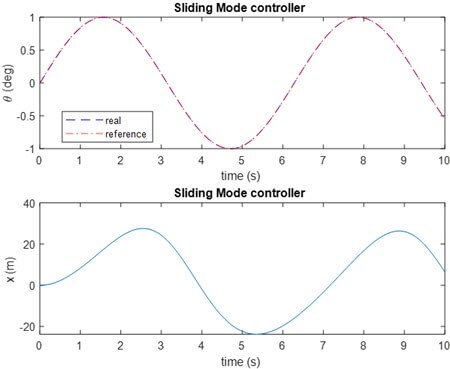
مود لغزشی
مجددا مشاهده می شود به خوبی مسیر مرجع را طی کرده است:
کلیدواژه:
Inverted Pendulum, Feedback linearization, Trajectory Following Control
شبیه سازی
Tracking Control of an Inverted Pendulum Using Computed Feedback Linearization Technique
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.