توضیحات
کنترل تطبیقی مبتنی بر IBLFs با زمان متغیر سیستمهای غیرخطی نامشخص با محدودیتهای حالت کامل
عنوان اصلی:
Time-varying IBLFs-based adaptive control of uncertain nonlinear systems with full state constraints
پیاده سازی الگوریتم کنترلی تطبیقی پسگام بر روی یک سیستم غیرخطی
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ویدیویی 7 دقیقه ای توضیحات در مورد شبیه سازی است.
توضیحات پروژه کنترل تطبیقی بر روی سیستم غیرخطی
شبیه سازی شامل دو ام فایل است. یکی ام فایل اصلی که برنامه با آن ران میشود و نتایج قابل نمایش است و دیگری شامل معادلات حل مسئله است. که در گزارش ویدیویی به توضیح در مورد فایل های شبیه سازی و نتایج بدست آمده پرداخته شده است.
این مقاله درباره طراحی یک کنترلکننده خودتنظیم برای سیستمهای غیرخطی با محدودیتهای زمانی واریان بر روی تمام حالتها است. نویسندگان این مقاله از تابعهای لیاپانوف متغیر با زمان و متکی به متغیرهای حالت (TVIBLFs) برای اطمینان از عدم نقض محدودیتها استفاده کردهاند.
نتایج بدست آمده از شبیه سازی با متلب

Fig. 1. The trajectories of x1 = y and yd
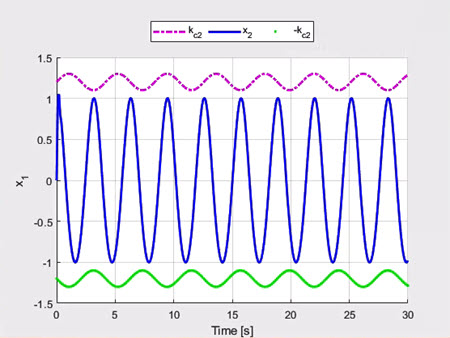
Fig. 2. The trajectory of x2
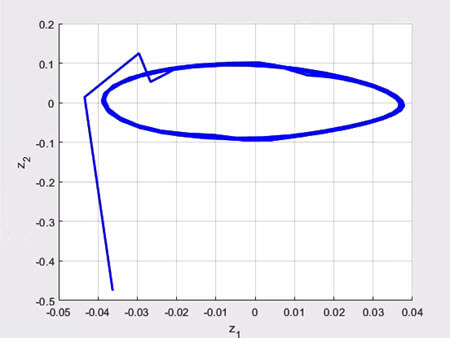
Fig. 3. The phase portrait of z1 and z2
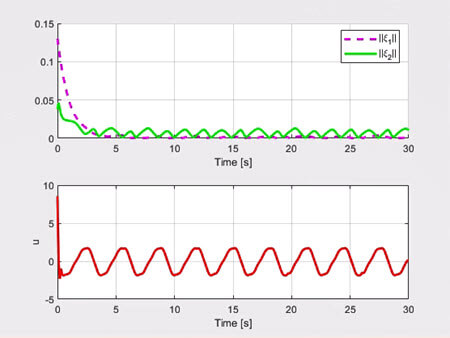
Fig. 4. The trajectories of ξˆ1, ξˆ2 and u
همانطور که مشاهده میشود نتایج بسیار نزدیک به مقاله بدست آمده است.
شاید به موارد زیر علاقه مند باشید:
- تنظیم MIMO PID برای سیستمهای فاز غیرمینیمم: تعیین محدودیتهای قابل دستیابی برای یک رفتار پایدار
- تشخیص و جداسازی عیب حسگر برای یک کلاس از سیستم غیرخطی نامشخص با استفاده از رویتگر مود لغزشی
- طراحی ناظر تابعی با مرتبه کسری ورودی نامشخص برای سیستم های مرتبه کسری با تاخیر زمانی لیپشیتس یک طرفه
- کنترل کننده تطبیقی برای سیستم های غیرخطی نامشخص با تاخیرهای زمانی متعدد
- سفارش شبیه سازی مقالات کنترل غیرخطی با متلب
کلیدواژه:
Adaptive control, Nonlinear systems, Integral barrier Lyapunov functions, Time-varying full state constraints
کنترل تطبیقی, سیستمهای غیرخطی, توابع لیاپانوف سد یکپارچه, محدودیتهای حالت کامل متغیر با زمان
کنترل تطبیقی مبتنی بر IBLFs با زمان متغیر سیستمهای غیرخطی نامشخص با محدودیتهای حالت کامل با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.