توضیحات
The Explicit Solution of Model Predictive Control via Multiparametric Quadratic Programming
شبیه سازی در محیط ام فایل متلب انجام شده است.
بخش 4 مقاله شبیه سازی شده است.
گزارش شامل مقدمه و تشریح کامل فرمول ها و کدهای متلب است.
در این پروژه برای حل مسئله mp-QP از تولباکس MPT متلب استفاده شده است.
این تولباکس یک تولباکس هماهنگ با YALMIP در متلب می باشد که به کمک آن می توان مسائل mp-QP را در متلب حل کرد.
روش Explicit MPC روشی هست که به طراحی کنترل کننده به صورت تحلیلی می پردازد.
یعنی بر خلاف روش های معمول در MPC این روش یک سری روابط به صورت فیدبک برای کنترل کننده پیشنهاد می کند.
مثل کنترل کننده های LQR ولی در این مقاله چون عملا سیستم دارای محدودیت هایی هست، پس نمی توانیم ادعا کنیم این کنترل کننده به صورت یک رابطه قابل نمایش هست.
به همین خاطر برای هر محدوده خاص یک کنترل کننده خاص بهترین جواب را میدهد به طوری که قیود مسئله رعایت شوند.
به همین خاطر ما نیاز داریم تا طی یک الگوریتم بتوانیم هم این محدوده های مشخص (Polyhera) ها را مشخص کنیم و همچنین اینکه برای آن کنترل کننده طراحی کنیم.
توضیحات بیشتر را با خرید این محصول دریافت نمایید.
نتایج شبیه سازی با متلب
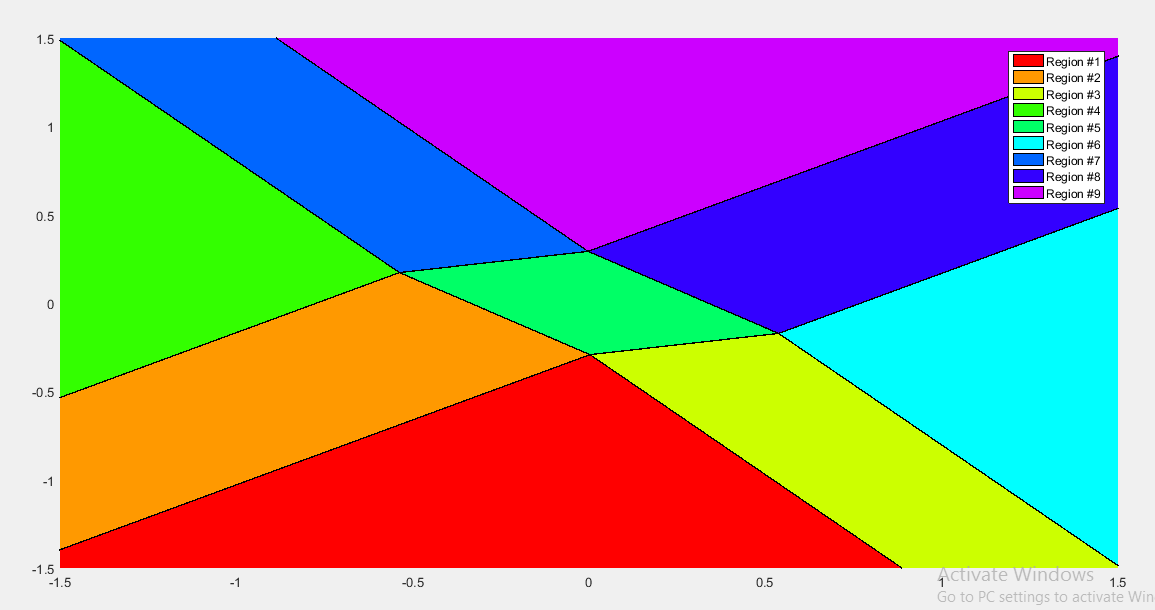
ابتدا مسئله بهینه سازی را حل نموده و سپس از متغیر sol نتایج حل را جدا کرده و چاپ می کند و تقسیم بندی polyhedral را نیز رسم می کند که نتیجه آن به صورت زیر است:
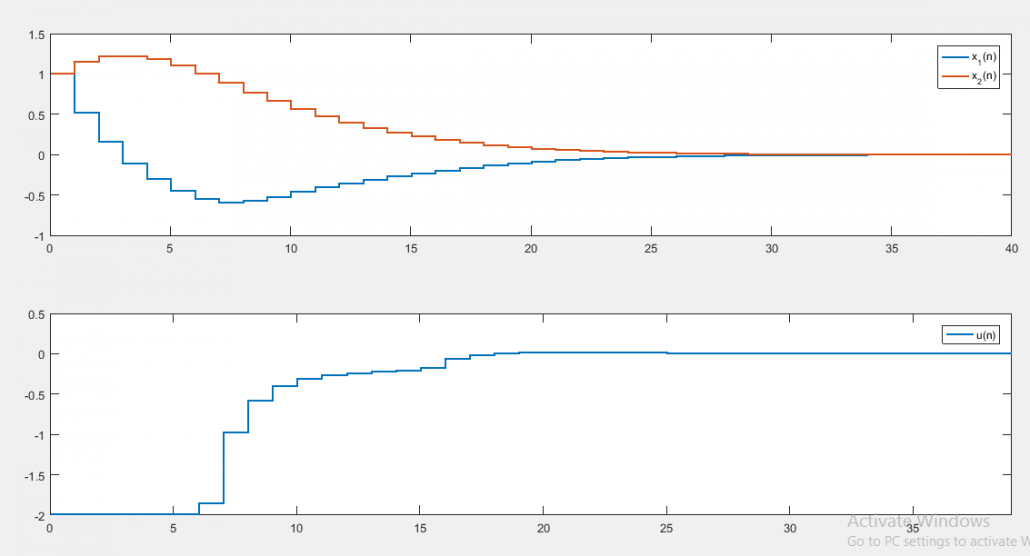
در ادامه در فایل Ex_01.m شبیه سازی نتایج بدست آمده از بهینه سازی برای کنترلر نوشته شده است که خروجی آن به صورت زیر است:
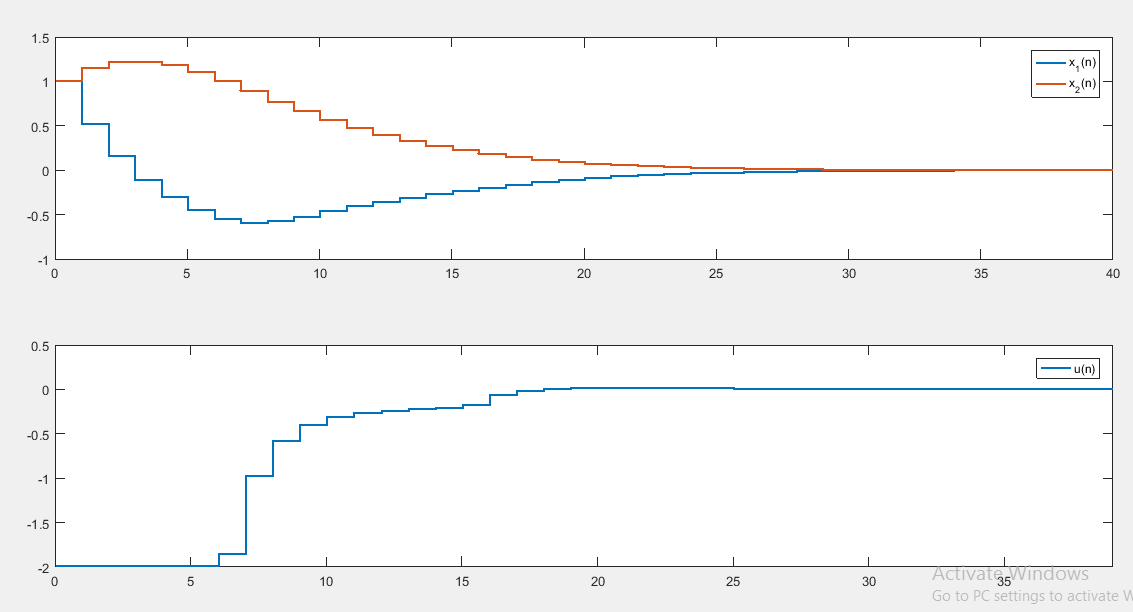
برای قسمت دوم شبیه سازی نیز دقیقا روند فوق تکرار شده است.
کلیدواژه:
Predictive models, Predictive control, Quadratic programming, Strain control, Linear systems, Laboratories,
Computational complexity, State feedback, Linear feedback control systems, Control systems
شبیه سازی مقاله
The Explicit Solution of Model Predictive Control via Multiparametric Quadratic Programming
توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.