
توضیحات
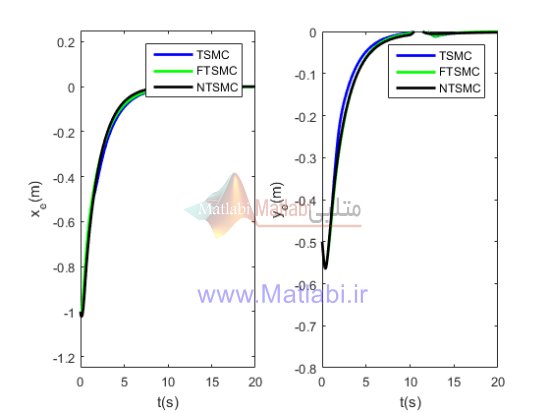
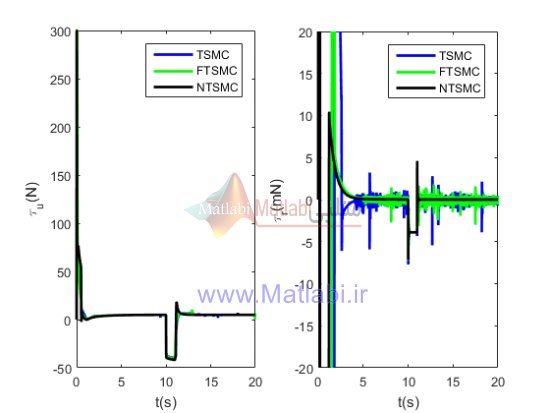
Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles
فایل های شبیه سازی شده در متلب به شرح زیر هستند:
جهت اجرا کافیست فایل main.m را اجرا کرده و صبر کنید تا شبیه سازی به طور کامل اجرا شده و نتایج کامل ترسیم شوند.
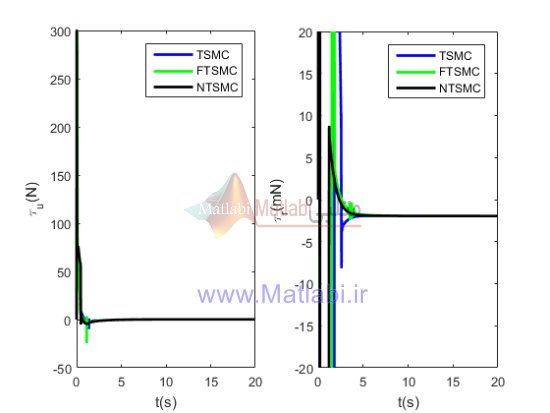
فایل های با نام ControllerU.m و ControllerU1.m و ControllerU2.m روابط 24 و 35 و 48 را پیاده سازی می کنند.
فایل های ControllerR.m و ControllerR1.m و ControllerR2.m روابط 25 و 36 و 49 را پیاده سازی می کنند.
فایل AUVMODEL.m مدل سیستم را پیاده سازی می کند.
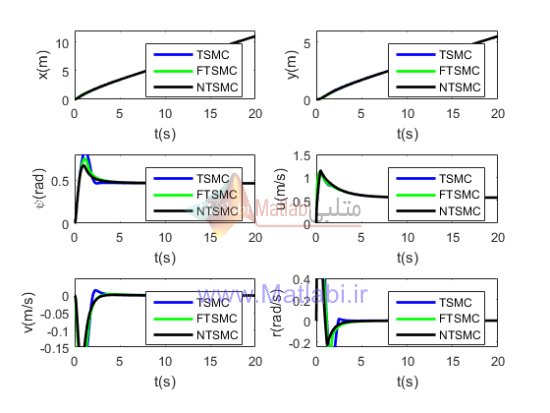
فایل DesiredVelocities.m رابطه 9 را پیاده سازی می کند.
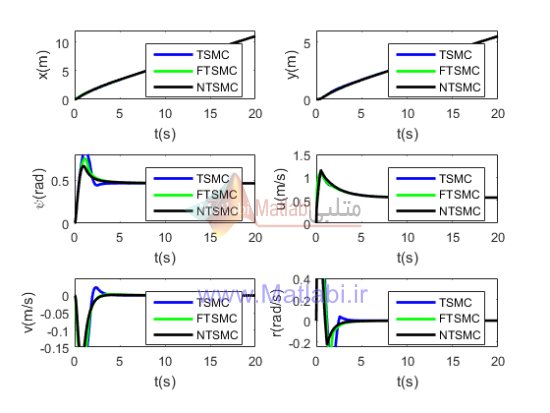
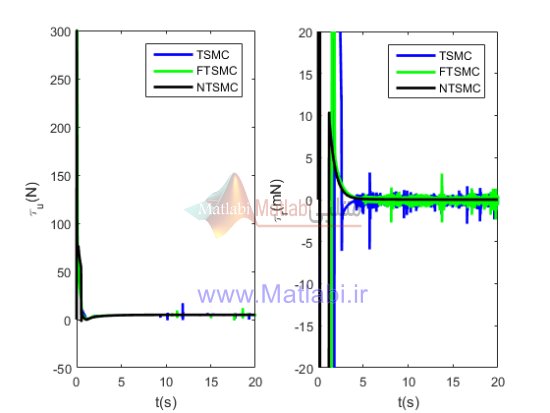
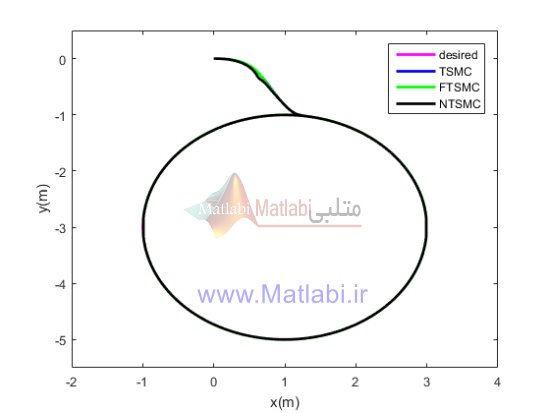
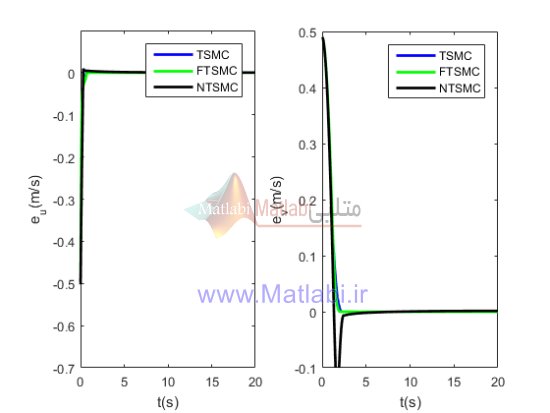
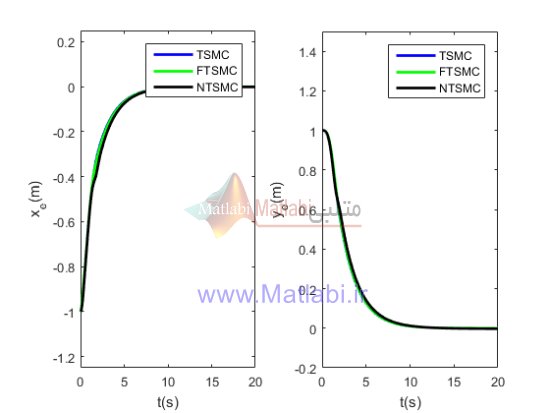
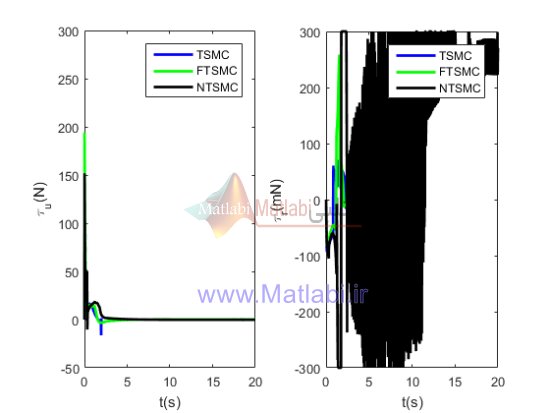
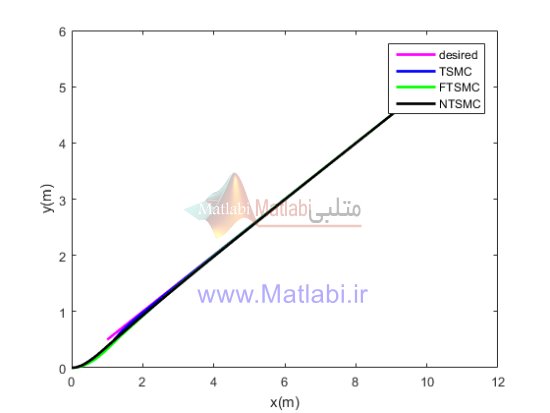
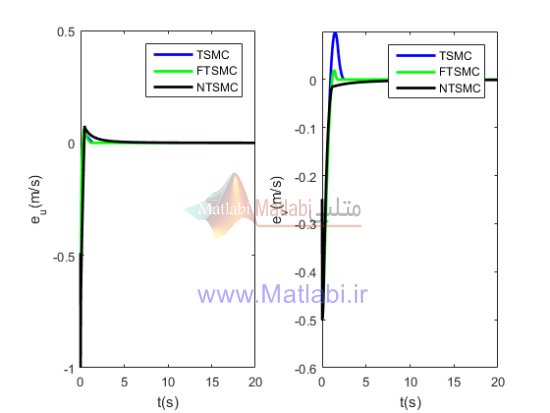
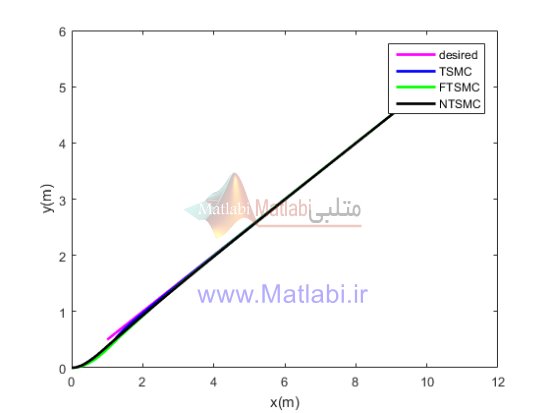
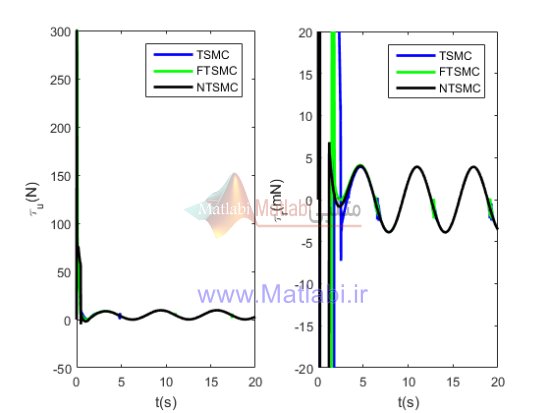
نتایج بدست آمده از شبیه سازی با متلب:










فایل ها در متلب 2015 نسخه b آماده شده است.
توجه شود برخی از شکل های شبیه سازی با پارامترهای داده شده در مقاله بدست نمی آیند. بنابراین سعی شده است با پیاده سازی دقیق روابط و پیدا کردن پارامترهای مناسب جواب های منطقی برای شبیه سازی بدست آید.
کلید واژه:
AUV, Autonomous Underwater Vehicle, Terminal sliding mode, TSM, Trajectory tracking, Underactuated
شبیه سازی مقاله
Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.