توضیحات
Task-Priority Control of Redundant Robotic Systems using Control Lyapunov and Control Barrier Function based Quadratic Programs
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش 2 صفحه ای در قالب ورد است.
توضیحات پروژه
جهت آشنایی با گزارش پروژه , بخشی از آن را در اینجا آورده ایم:
فایل func_boundary.m
از ابتدا تا انتهای این کد، مرزهای مربوط به هر یک از متغیرهای حالت تعریف میشود.
فایل func_initial.m
در این فایل مقدار اولیه متغیرهای حالت و ورودی های کنترلی در هر گام از شبیه سازی محاسبه میگردند.
فایل func_deriv.m
معادلات حالت مربوط به ربات در این فایل نوشته میشوند. دقت شود که پیش تر هم عرض کردم که مقادیر عددی پارامترهای ربات در این مقاله و نیز دو مقاله ای که بعدا فرستادید موجود نیستند، در نتیجه معادلات تقریبی هستند ولی با این وجود نتایج در محدوده مانند مقاله می باشند.
فایل main.m
شبیه سازی با اجرای این کد انجام میشود.
خطوط 17 و 18: طمانهای ابتدا و انتهای شبیه سازی
خط 19: از آنجا که شبیه سازی یک مسئله بهینه سازی است، مقدار ماکزیمم زمانی را که میتواند حل مساله در آن انجام شود در این خط آورده شده است.
خطوط 20 و 21: قیود ابتدا و انتهای ورودی کنترلی و مشتق تغییرات آن.
خطوط 23 تا 38: قیود اعمالی بر متغیرهای حالت طبق مقاله.
ادامه گزارش و دریافت فایل های شبیه سازی و مقاله با خرید این محصول ممکن است.
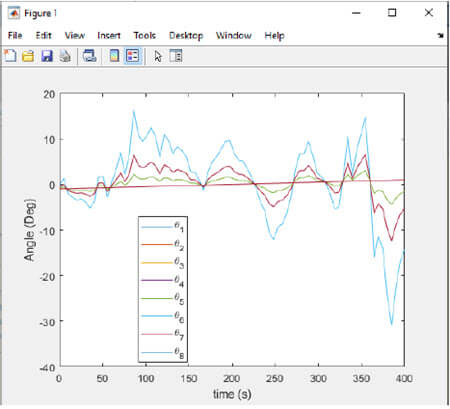
نتایج شبیه سازی با متلب
در زیر نتیجه خروجی شبیه سازی صورت گرفته را مشاهده مینمایید.
کلیدواژه:
Motion control systems, mobile robots, robotics technology, optimization, nonlinear control, Lyapunov methods, redundancy resolution, task-priority control
شبیه سازی
Task-Priority Control of Redundant Robotic Systems using Control Lyapunov and Control Barrier Function based Quadratic Programs
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.