توضیحات
Reference Compensation Technique of Neural Force Tracking Impedance Control for Robot Manipulators
پروژه ، درمورد کنترل نیرو و مکان بازوی ربات تحت شرایط غیرقطعی بوسیله جبرانساز عصبی می باشد.
درواقع، بدلیل مدلسازیهای ریاضیاتی ناقص از معادلات رباتها، همواره برای کنترل عملکرد رباتها دچار مشکل هستیم. لذا، برای رفع عواقب ناشی از عدم آگاهی کامل به معادلات حاکم بر ربات، اقدام به استفاده از جبرانسازهای عصبی میکنیم.
این جبرانسازها، با یادگیری نحوه عملکرد واقعی ربات و همچنین نوع درخواست ما از رفتار ربات، سیگنالهای مناسب جهت بهبود عملکرد ربات را ارائه تولید میکند. بدین صورت که با یادگیری پاسخ مدل و همچنین، بررسی سیگنالهای مطلوب، اقدام به ایجاد شبکهای کردهایم که بر اساس رفتار کنونی ربات، سیگنال صادر شده به ربات را تصحیح کرده و رفتار ربات را در پیروی از میزان نیرو و محل قرارگیری بازو تعقیب میکند.
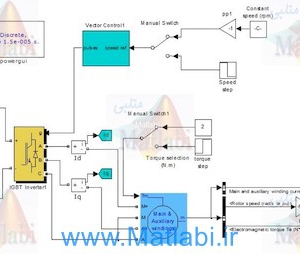
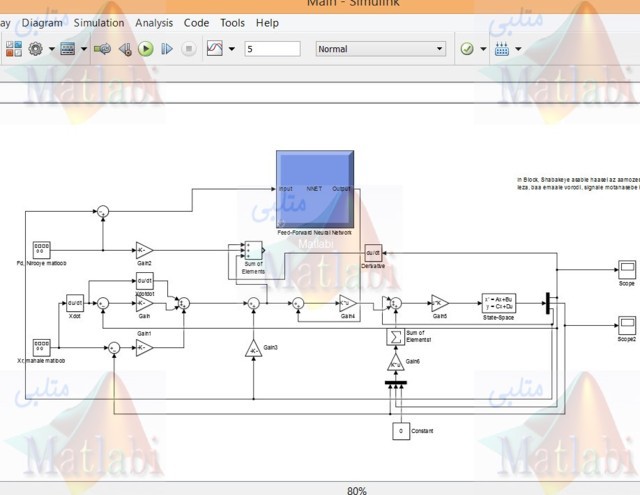
در این پروژه نیز، ابتدا اقدام به پیاده سازی معادلات ربات کرده و سپس، شبکه عصبی را با داده های حاصل از مدل ربات و مدل مطلوب آموزش می دهیم.
با اعمال شبکه عصبی به مدلسازی مطابق مقاله، نحوه تصحیح سیگنال ارسالی به ربات برای تعقیب نیرو و محل درخواستی را بررسی میکنیم.
در این پروژه، بدلیل عدم دسترسی به ماتریسهای بکار رفته در مقاله، اقدام به وارد کردن مقادیر بصورت دستی کرده ایم. لازم به ذکر است که، عدم وجود مقادیر مربوط به ماتریسها و همچنین، معادلات دینامیکی ربات، موجب میشود که نتایج بدست آمده با نتایج ذکر شده در مقاله متفاوت باشد.
گزارش در حد توضیحات همین صفحه موجود است.
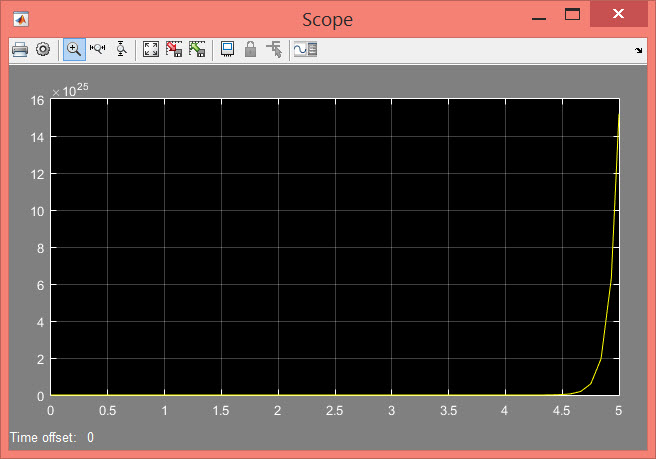
نتایج شبیه سازی با متلب
کلید واژه: component, neural network, robot manipulator
شبیه سازی مقاله
Reference Compensation Technique of Neural Force Tracking Impedance Control for Robot Manipulators
طبق توضیحات فوق تهیه و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.