توضیحات
State Estimation of an Autonomous Helicopter Using Kalman Filtering
تخمین حالت های هلیکوپتر با استفاده از فیلتر کالمن
پروژه درس کنترل مدرن
در این پروژ فضای حالت سیستم بدست آمده
کنترل پذیری و رویت پذیری بررسی شده است.
تحقق مینیمال و مقادیر ویژه سیستم بدست آمده
در نهایت نیز از فیلتر کالمن استفاده شده است.
گزارش شامل 7صفحه در قالب ورد است و شبیه سازی با متلب نیز موجود است.
در بخشی از توضیحات گزارش آمده:
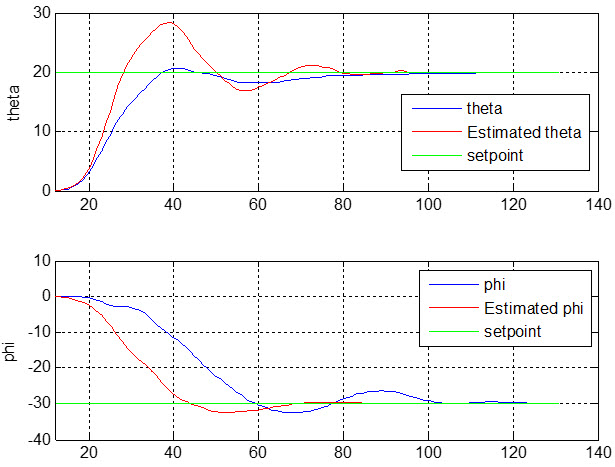
ملاحظه می شود در حضور نویز،کالمن فیلتر تخمین خوبی از دو متغیر زده است. ولی سیستم داده شده دارای مقادیر ویژه ی سمت راست محور می باشد؛ که در مرجع 16 آنرا کنترل کرده است.
در این حالت از فیدبک حالت برای جایابی قطب ها به سمت چپ محور استفاده می کنیم(خط 68 تا 79.دستور استفاده از فیدبک حالت place است).
بعد برای هر دو حالت(یکی سیستم اصلی و دیگری سیستم تخمین زده شده توسط فیلتر کالمن) سیستم را کنترل می کند.
در این حالت نیز خروجی ها به ازای درجه سیستم را بررسی می کنیم(خط 81 تا آخر اومدیم سیستم حلقه بسته با فیدبک حالت را نوشته و به سیمولینک ارجاع دادیم و بعد با کنترل کننده PID سیستم را کنترل کردیم ).
کلید واژه : شبيه سازي يک مدل فيلتر کالمن, پروژه متلب, پروژه matlab , شبیه سازی با متلب
Kalman filter, gyroscopes, accelerometers
شبیه سازی
State Estimation of an Autonomous Helicopter Using Kalman Filtering
برای درس کنترل مدرن و طبق توضیح فوق تهیه شده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





