توضیحات
Stable optimal control applied to a cylindrical robotic arm
کنترل بهینه برای مسیر یابی ربات
در این مقاله یک روش کنترل بهینه برای مسیر یابی ربات ارائه شده است.
بعد از اجرای شبیه سازی و اجرای ام فایل Plot_fig نتایج زیر به دست می آیند:


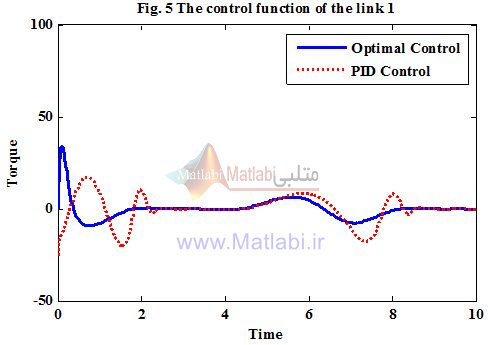

تذکر: ممکن است بین شکلهای بدست آمده و شکلهای موجود در مقاله مقداری اختلاف وجود داشته باشد که دلیل آن برخی اطلاعات ناقص مقاله می باشد (مانند مقدار اولیه S که مقدار آن داده نشده است و به صورت پیش فرض صفر در نظر گرفته شده است).
ولی تحلیل نتایج بدست آمده همانند تحلیل های ارائه شده در مقاله می باشد.
کلید واژه : پایداری، کنترل بهینه , پروژه متلب, پروژه matlab , شبیه سازی با متلب
Optimal control, Cylindrical robotic arm , Stability
شبیه سازی
Stable optimal control applied to a cylindrical robotic arm
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.