توضیحات
Solution of optimal power flow with FACTS devices using a novel oppositional krill herd algorithm
ترجمه موضوع مقاله: راه حل جریان برق بهینه (توان) ادوات fact [1] با استفاده از یک طرح مخالف الگوریتم krill herd[2] گروه میگوه ها
در این مقاله پخش بار بهینه شبکه قدرت به همراه ادوات فکت از قبیل TCSC و TCPS با الگوریتم میگوی اصلی و میگوی مخالف پرداخته است و چهار تابع هدف تلفات و هزینه تولید و هزینه الودگی زیستی و مجموع سه هزینه برای بهینه سازی استفاده شده است و متغیرهای بهینه سازی به ترتیب برابر توان ژنراتورهای تولیدی بجز اسلک و ولتاژ ژنراتورها و تپ ترانس ها و ظرفیت توان راکتیو اضافی و راکتانس اداوات TCSC و زاویه شیفت فازی TCPS است.
برای مثال در شبکه 30 باسه IEEE در متپاور مطابق شکل زیر ابتدا مشخصات شبکه را لود کرده و سپس مکان شنت و اداوات فکت را تعیین کرده و برایت تعیین تابع هدف در بردار W بصورت ضریب صفر و یا یک میتوان نوع تابع هدف را تعیین کرده
…
البته ضرایب حداقل و حداکثر متغیرها و ضرایب بسیاری از متغیرها نامشخص بوده و برای همین از ضرایب تست قابل قبول استفاده کرده و نتایج بهینه سازی برای W فوق بصورت زیر برای دو الگوریتم کریل معمولی و کریل مخالف است.
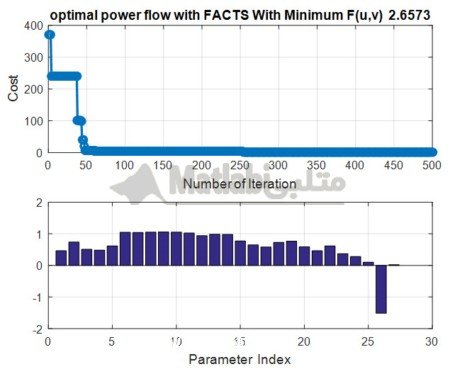
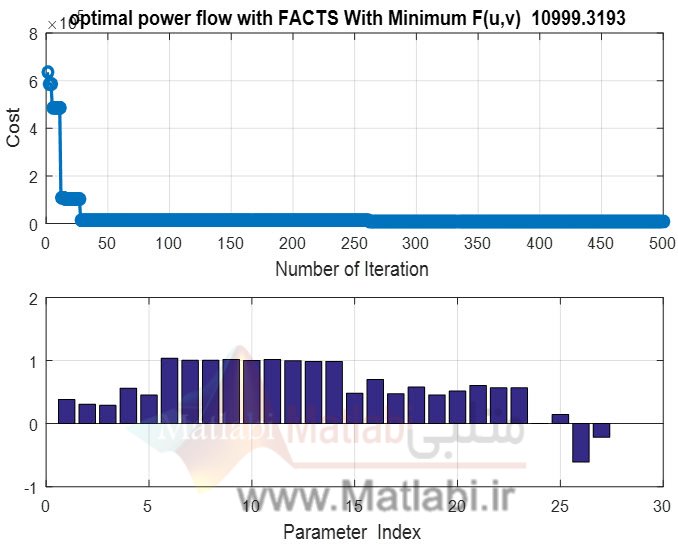
نمودار زیر برای کریل معمولی است که نمودار همگرایی بصورت نمودار خطی کاهش یافته بهمراه متغیرهای بهینه سازی بصورت میله ای نمایش داده شده است.
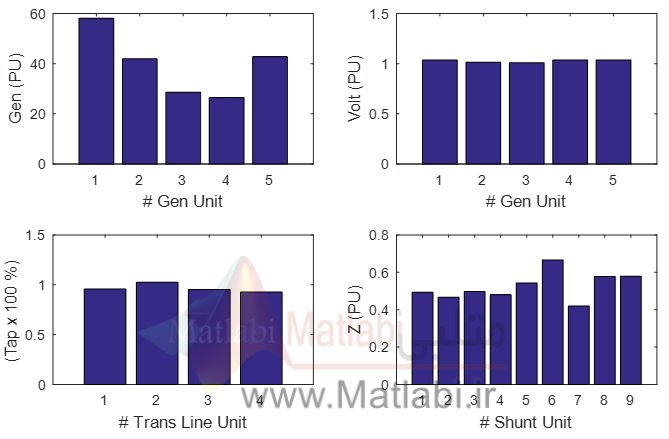
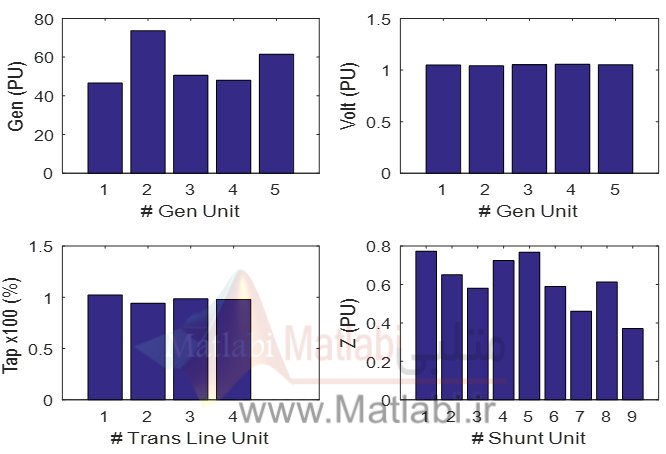
و نمودار ضرایب توان و ولتاژ و تپ ترانس و شنت در حالت بهینه بصورت زیر است.
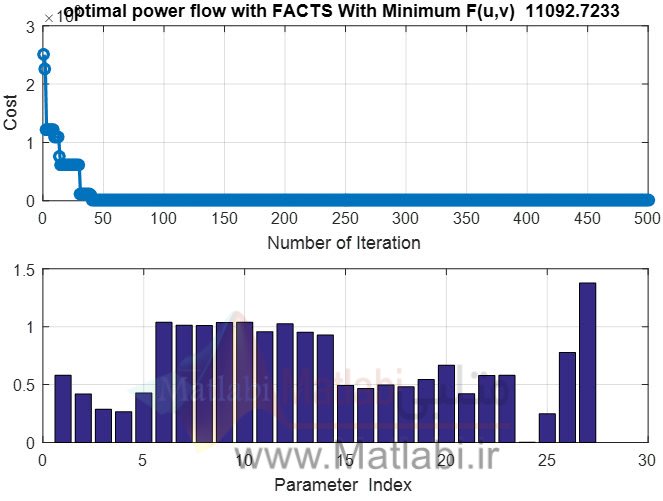
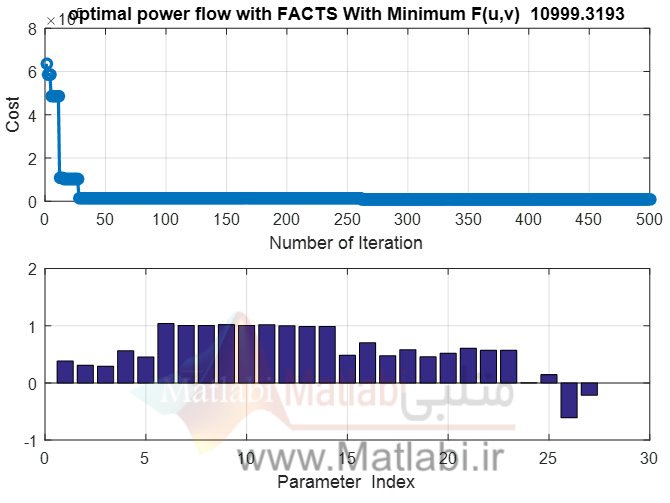
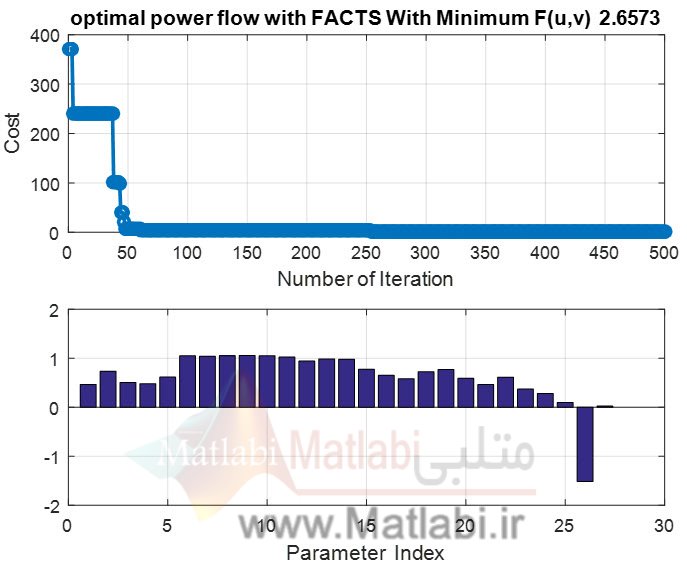
و با اجرای mainsOpositKrill با کریل اپوزیت نتایج زیر حاصل میشود که هزینه کل نسبت به کریل معمولی کاهش یافته است.
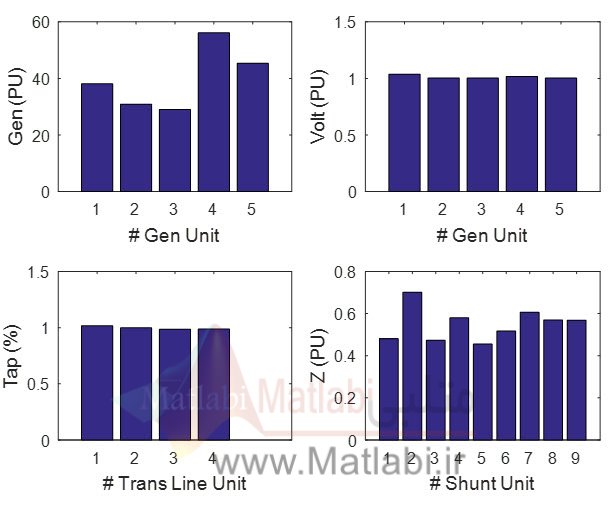
نتایج کریل معمولی برای W=[0 1 0] بصورت زیر است.
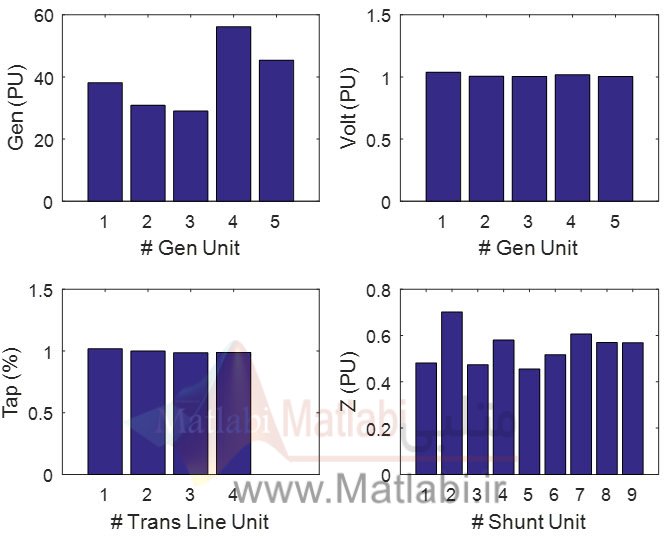
نتایج کریل مخالف برای W=[0 1 0] بصورت زیر است که نسبت به کریل معمولی هزینه کمتر شده.
درضمن برای اجرای برنامه نیاز به تولباکس matpower 6.0 است که باید پوشه متپاور با کلیک راست در مسیرمتلب بصورت زیر قرار گیرد.
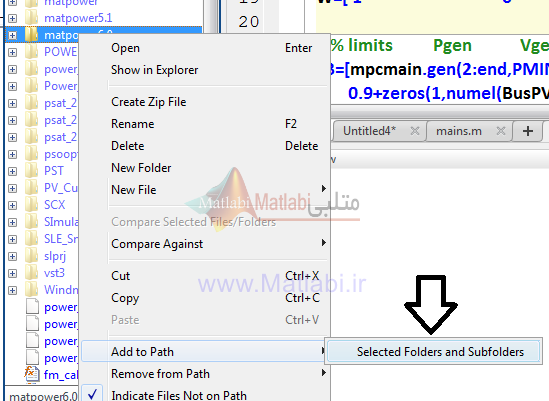
و ادرس سایت متپاور بصورت http://www.pserc.cornell.edu/matpower است که میتوان ورژن 6 را دانلود کرده و سپس در مسیر متلب قرار داده و سپس فایل را اجرا کرد.
ترجمه: راه حل جریان برق بهینه (توان) ادوات fact [1] با استفاده از یک طرح مخالف الگوریتم krill herd[2]
چکیده:
الگوریتم krill herd یک روش یا یک طرح جدیدی است که از رفتار توده وار(دسته جمعی) کریل ها (منظوراز کریل ها میگوست) برای جستجوی غذا و ارتباط با یکدیگر تحت تاثیر قرار گرفته است.
این پیشنهاد ، بر اسـاس مخالفت با KHA[3] ( OKHA ) در نظر گرفته شده است, برای حل مشکل جریان برق بهینه یا به قول معروف پخش بار بهینه (OPF)سیستم قدرت، ترکیب سیستمهای انتقال Ac انعطاف پذیر(ادوات fact) ،در دونوع: یعنی تریستور کنترل کننده خازن های سری و تریستور کنترل کننده تغییر فاز. در روش پیشنهادی okha مفهوم اساس مخالفت در مقدار دهی اولیه جمعیت وجهش نسل بر اساس مخالفت KHA برای افزایش سرعت محاسبات و مشخصات همگرایی آن است.
پتانسیل okha پیشنهادی ارزیابی شده است، موفقیت در اصلاح شبکه های 30شینه و 57 شینه با استاندارد IEEE30,IEEE57 در سیستم قدرت تست شده اند.
چهار تابع هدف مختلف در این فرموله که نشان دهنده حداقل هزینه سوخت, تلفات انتقال توان اکتیو ، انتشار و ترکیب شدن هزینه های اقتصادی و زیست محیطی، به طور جداگانه میباشد.
نتایج شبیه سازی ارائه شده در این مقاله، در موارد چاپی اخیر دولت از طرح، از جمله اساس KHA است. و همچنین اثربخشی خود را برای حل مشکل OPF سیستم های قدرت مجهز به ادوات FACTS نشان می دهد.
مقدمه:
جریان برق بهینه یا پخش بار بهینه (OPF) روشی مفید در سیستم مدیریت انرژی جدید است. که نقش مهمی برای عملکردی ایمن از سیستم قدرت ، کنترل و برنامه ریزی دارد. هدف اولیه از OPF این است: به حداقل رساندن هزینه کل تولیدات تمام سیستم برای انجام(اجرای) تقاضای بار از یک سیستم قدرت خاص با شرط حفظ امنیت عملیات سیستم. در شرایط پایدار ، هر دستگاه در سیستم قدرت باید در محدوده عملیاتی مورد نظر باشد. این شامل محدوده حداقل و حداکثر [a] توان اکتیو و راکتیو خروجی ژنراتور و[b] اندازه ولتاژ بار از هر شین در شبکه، [c] جریان توان ظاهری خطوط انتقال قدرت، [d] تنظیم tab ترانسفورماتور [e] تزریق توان راکتیو.
این روش به دقت مورد بررسی قرار گرفته است، در طول چند دهه گذشته و آن بادقت حل شده است، با تنوع گسترده ای از تکنیک های بهینه سازی مرسوم مانند روش نیوتن ، برنامه نویسی خطی، برنامه نویسی متغیر یا دینامیکی و روش نقطه داخلی ، بسیاری از تکنیک های بهینه سازی تکاملی مانند الگوریتم ژنتیک ، برنامه نویسی تکاملی ، از کلنی مصنوعی زنبور عسل، بهینه سازی تغذیه باکتری ها، الگوریتم جستجوی گرانشی است. در این مقاله OPFبه عنوان مشکل همیشگی مطرح شده است، افزایش یکنواخت تابع هزینه ومشتق پذیر بودن آن.
با این حال، سیستمهای عملی غیر خطی مرتبه بالاتر در اثر واحد های تولید حرارتی و ناپیوستگی به دلیل اثر بارگذاری نقطه دریچه.
بنابراین، روش های بهینه سازی های جدید مورد نیاز برای حل این مشکلات هستند.رفرنس 8 دانلود [4]شود.
بهینه سازی ازدحام ذرات، بهینه سازی مبتنی بر جغرافیای زیستی وغیره….. این روش می تواند غیر محدب را حل کند، غیر صاف و غیر قابل تشخیص، مسائل بهینه ساز کارآمد و موثر.
اما در صنعت برق تجدید ساختار شده،سیستم های انتقال AC انعطاف پذیر (FACTS) به طور وسیع مورد استفاده قرارمیگیرند در روزهای اخیر برای افزایش قابلیت انتقال قدرت خط انتقال بلند و همچنین پایداری سیستم را بهبود بخشد .
این ابزارها قادر به کنترل جریان ، ولتاژ وامپدانس و زاویه فاز(PF) انتقال سیستم برای افزایش پایداری سیستم ، اصلاح ضریب قدرت، به حداقل رساندن تلفات و از همه مهمتر مدیریت جریان توان اکتیو و راکتیو و پروفیل ولتاژ.
از این رو، مشکل همیشگی OPF، ترکیب شده با ادوات, FACTS ، فرصت های جدید برای کنترل جریان توان اکتیو و راکتیو و روش های مختلف بهینه سازی باز کرده است، مثل شبیه سازی دوباره و کد گذاری واقعی ، وتغیر وتحول دیفرانسیل .
استراتژی پویا بر اساس تجزیه سریع، برای حل این مشکل opf درسیستم قدرت استفاده شده است.
ap, bp, cp ضرایب هزینه سوخت ژنراتور pth است.
dp, ep ضرایب هزینه سوخت با اثر نقطه شیر بارگذاری ژنراتور pth
E(Pg) کل میدان مغناطیسی
FC کل هزینه سوخت واحدهای تولید
g(u, v) معادل محدودیت دستگاه
Gk کاندوکتانس خط متصل بین شین های pام و qام.
Gpq, Bpq کاندوکتانس و سوسپتانس بین شین pام وqام به ترتیب.
h(u, v) مخالف مجموعه ای از محدودیت ها.
NB تعداد کل شین
Nc تعداد بانک های خازنی
NL تعداد خطوط انتقال
NPQتعداد شین بار
NPVتعداد شین ژنراتور
NT تعدادشیر تنظیم ترانسفورماتور
N TCPS تعداد دستگاههای TCPS نصب شده در آزمایش سیستم قدرت .
NTCSC تعداد دستگاههای TCSC نصب شده در آزمایش سیستم قدرت
of تابع هدف به حداقل برسد
OF(FU, E) ترکیب هزینه های اقتصادی زیست محیطی.
PGp, QGp تولید توان اکتیو و راکتیو از شین P ام، به ترتیب.
PGPmin,PGPmax محدودیت حداقل وحداکثرتوان اکتیوازواحدتولید Pام،به ترتیب
PLoss کل تلفات توان
PLP, QLP توان اکتیو و راکتیو مورد نیاز از شین Pام، به ترتیب
Ppk, Qpk تزریق توان اکتیو و راکتیو از TCPS به شین Pام، به ترتیب
Ppq, Qpq جریان انتقال توان اکتیو و راکتیو از شین Pام به شین qام به ترتیب.
Pps, Qps تزریق توان اکتیو و راکتیو ناشی از شینp به TCPS به ترتیب.
Pqs, Qq تزریق توان اکتیو و راکتیو ناشی از شین qبه TCPS به ترتیب
QCPmin,QCPmax حداقل و حداکثر VARتزریقی از خازن موازیPام،بترتیب
QGPmin,QGPmax حداقل و حداکثر توان راکتیو از ژنراتور واحد Pام، به ترتیب
Rpq , Xpq مقاومت و راکتانس خط انتقال، به ترتیب
S Lp توان ظاهری شاخه Pام
Slpmax حداکثر جریان توان ظاهری مسیر Pام.
TPmin , TPmax حداقل و حداکثر تنظیم tab از ترانسفورماتور Pام، به ترتیب
U بردار متغیرهای وابسته
V بردار متغیرهای مستقل
VLPmin,VLPmax حداقل و حداکثر ولتاژ بار از شین بار Pام، به ترتیب
Vp, Vq اندازه ولتاژ در شین p,q
XC راکتانس TCSC خط انتقال متصل بین شین pام وqام.
XTPmin,XTPmax حداقل وحداکثر راکتانس pام TCSC به ترتیب.
Ypq ادمیتانس کل خط انتقال بین شین های Pام وqام.
αp , βp ,Ɣp , ɳp p,ג ضرایب انتشار ژنراتور pام
TPmin,max ᶲ حداقل و حداکثر تغییرزاویه فازpام TCPS ، به ترتیب
Pqθ زاویه ادمیتانس خط انتقال متصل بین شین pام وqام
[21] KHA یک روش و رویکرد جدید و هوشمنده، توسط آقایان گندمی و علوی برای مشکل بهینه سازی جهانی در سال 2012 ارائه شده است. این روش مبتنی بر قیاس شبیه سازی رفتار گروه KRILLها درطبیعت است.
موقعیت برای هر کریل از سه عمل مختلف تعیین می شود. (a) حرکت ناشی از دیگر کریل،(b) قعالیت جمع آوری آذوقه (c) پراکندگی تصادفی. اخیرا، KHA استفاده شده است در برخی زمینه های مورد علاقه پژوهشی مانند مشکلات بهینه سازی چند نمونه ای استفاده می شود.[22] نمونه مسائل بهینه سازی[23] ترکیب مشکل گرما و پخش توان[24] ساختار مشکلات بهینه سازی[25] و طراحی بهینه سازها[26]. چند نمونه از KHA ترکیبی در مقاله مانند تئوری بی نظمی براساس kha برای حل مسئله توابع معیار ارائه شده است، [27] مشکلات پخش توان راکتیو بهینه[28]
KHAفازی (که با استفاده از سیستم فازی به عنوان پارامتر تنظیم کننده)برای نمایش تست تابع بهینه ساز.[29]
گروه KHA (که به معرفی انتخاب گروه و عملگر متقاطع برای فرآیند بهینه سازی عددی) [30][5]
DEکمک KHA میکند برای مسئله پخش بار اقتصادی سیستم قدرت.[31] بنابراین، بررسی مقاله نشان می دهد که این الگوریتم و یا هر نوع آن هنوز در مسئله OPF سیستم قدرت مجهز به ادوات FACTS اعمال می شود. پس،انگیزه کار پیشنهادی توسعه یافته می شود. در این مقاله اساس یادگیری مخالف مفهوم است.[32]
اساس مخالفت تولید پرشی ترکیب شده مبنی برKHA برای دستیابی به سرعت محاسبات پیشرفته و بهبود سرعت همگرایی ترکیب شده است.
OBL[6] در مقاله نشان داد که این روش راه حل موثری اعمال شده با روش های مختلف بهینه سازی.[33-35]
بنابراین، این مقاله یک روش بهینه سازی جدید مخالف KHA برای حل مشکل OPF سیستم قدرت مجهز به ادوات FACTS.
در این مقاله، دونمونه از ادوات FACT ، یعنی، تریستور کنترل کننده خازن سری(TCSC) و تریستور کنترل کننده تغیر فاز(TCPS). در نظر گرفته شده است که برای حل مشکل OPFشین IEEE-30 و شینIEEE-57 برای تست سیستم های قدرت. این دو ادوات FACTS در نظر گرفته در نقاط استراتژیک ثابت شود ، مکان شبکههای برق محسوب میشود .
پیشنهاد OKHA با هدف تعیین تنظیمات بهینه از متغیرهای با چهار هدف مختلف، بصورت جداگانه، مانند حداقل رساندن از (a) هزینه سوخت باو بدون در نظر گرفتن اثرات نقطه دریچه، (b) تلفات انتقالی توان اکتیو(c) انتشار (d) ترکیب هزینه سوخت و انتشار در حالی که حفظ تمام برابری و نابرابری محدودیت ها و همچنین محدودیت های فیزیکی ادوات FACTS.
بقیه مقاله به شرح زیر سازماندهی شده است: بخش ثابت نمونه های ادوات FACT، مدل سازی بشی ادوات FACT رانشان میدهد. بخشی از مشکل فرمول سازی ارائه شده در قسمتی از فرمولهای ریاضی. بخش KHAتوصیفی اساس KHAاست.
بخش اجرای الگوریتم پیشنهاد شده در اجرای OKHA برای مشکل OPF با FACTS ‘توصیف کرد. نتایج شبیه سازی ارائه شده و مورد بحث قرار گرفته در قسمت نتایج شبیه سازی و بحث و گفتگو.
در نهایت، نتیجه گیری از کار حاضر همراه با دامنه را برای کار آینده در “بخش نتیجه گیری و دامنه آینده کار ارائه شده است.
نمونه های از حالت پایداری ادوات FACTS.
مدلسازی TCSC
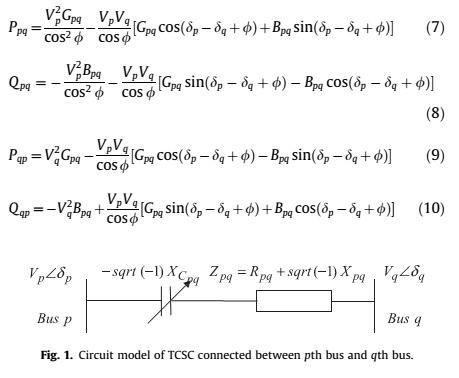
تاثیر TCSC بر روی یک شبکه سیستم قدرت ممکن است توسط یک راکتانس قابل کنترل باشد که به صورت سری به خط انتقال مرتبط قرار داده ارائه شده است.
مدل استاتیک شبکه با TCSC که متصل شده بین شین pام وqام است که در شکل1 نشان داده شده است. [13,36]
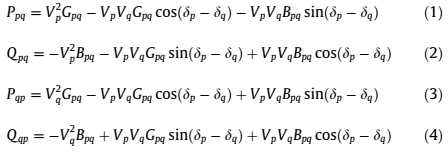
این معادلات جریان قدرت مربوط خط TCSC[7] است که به شرح زیر است:
کنداکتانس خط انتقال : …
سوسپتانس خط انتقال: 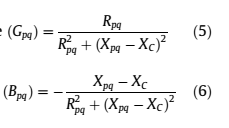
PPQ، Qpq توان اکتیو و راکتیو بین شین های pام وqام است. VP، VQ بزرگی ولتاژ در شین های p,q، به ترتیب؛ Gpq, Bpq کنداکتانس و سوسپتانس بین شین های p,qاست.
pδ و qδ زاویه ولتاژ شین های pام و qام ،به ترتیب. Rpq, Xpq مقاومت و راکتانس خط انتقال. XC نشان دهنده راکتانس TCSC قرار داده شده در خط انتقال متصل بین شین های pام وqام.
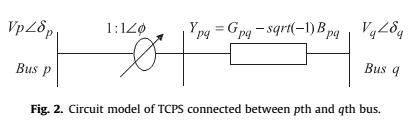
مدلسازی TCPS[8]
TCPS ممکن است نمنونه ای است ازتغییر فاز ترانسفورماتور با یه نسبت بهره برداری:
1<ᶲ و ادمیتانس سری YPq=(GPq – Sqrt(-1)BPq) متصل بین شین های Pام وqام نشان داده شده در شکل 2 . [13,36] معادلات خط به صورت زیر است :
یک تریستور کنترل تغییر فاز می تواند یک تغییر مداوم در زاویه ولتاژ فاز بین دو انتهای خط که در آن TCPS متصل است اعمال کنند. TCPS معمولی شامل یک جفت ترانسفورماتور محرک و تقویت کننده(افزایش دهنده) است. TCPS به طور معمول در خط بین شین K و M با ترانسفورماتور محرک آن توسط شینK تغذیه شده، متصل شده است . ولتاژ تزریق شده می تواند به عنوان یک منبع ولتاژ ایده آل ها Vse سری، با امپدانس خط ZKM مدل شود . مدل تزریقی با جایگزین کردن منبع ولتاژ توسط ،منبع جریان K معادل به صورت موازی با خط به دست آمده است. ُ
مدل استاتیک از TCPS در شکل 3نشان داده شده است. [13,36]
تزریق توان اکتیو وراکتیو از TCPSبه شین های Pام وqام به صورت زیر است:[15,20]
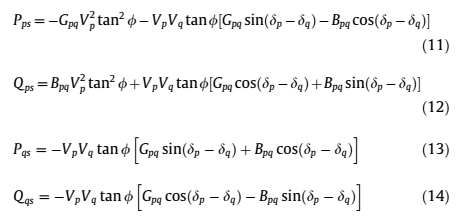
Pps, Qps توان اکتیو وراکتیو تزریقی به شین Pناشی از TCPSاست وPqs, Qqs تزریق توان اکتیو وراکتیو به شین q ناشی از TCPSاست.
فرمولهای مسائل ریاضی:
هدف از OPF اینه برای به حداقل رساندن یک تابع هدف ضمن برآورده شدن همه قید های برابری و نابرابری. مشکل بهینه سازی در حال حاضر مشکل OPF ترکیب شده با دو ادوات FACTS مانند TCSC و TCPS معادلات با چهار تابع هدف مختلف ضمن برآورده همه معادلات و محدودیت های نابرابری و همچنین محدودیت های عامل فیزیکی استفاده شده ادوات FACTS..
فرمول کلی این نوع مشکل ممکن است به عنوان یک مسئله بهینه سازی محدود به شرح زیر است:

که در آن استof که تابع هدف به حداقل می رسد استg(u,v)محدودیت ها وقیدهای از معادلات است.
h(u,v) محدودیت ها و قیود معادلات نابرابر(نامعادله) است. U بردار متغیرهای وابسته شامل تولید توان اکتیو خروجی شین مرجع استPG1. ولتاژ بار(VL1;…;VLNPQ) ، قدرت راکتیو تولیدی (QG1……QGNPv) ، بار خط انتقال( SL1,………………,SLNL) ،و v بردار متغیرهای مستقل شامل است ژنراتورها. توان اکتیو به جز شین مرجع (PG2,…..,PGN PV)، ولتاژ ژنراتورها(VG1,…..,VGN PV)، تنظیمات Tab ترانسفورماتور(T1,…..TNT)،توان راکتیو تزریقی (QC1,….QCNC) [15,20]
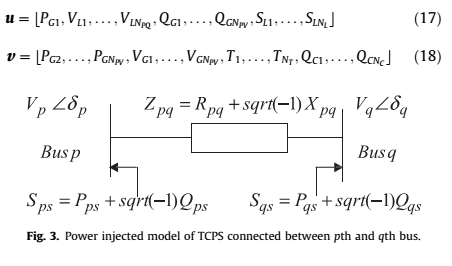
که درآن NPV تعداد شین های ژنراتوراست وNPq تعداد شین بار است و NL تعداد خطوط انتقال است و NT تعداد شاخه تغییر Tabترانسفورماتور و NC تعداد بانک خازنی است.
محدوده ها
در اینجا، G مجموعه ای از محدودیت معادل نشان دهنده ی بار استجریان معادلات به شرح زیر است.[15,20]
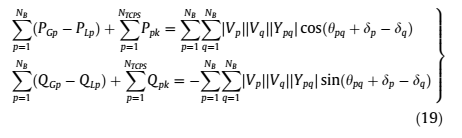
در این قسمت PGP,QGP به ترتیب توان اکتیو و راکتیو شین Pام است. و PNL,QNL به ترتیب توان های اکتیو و راکتیو مورد تقاضا از شین Pام است. PPK,QPK به ترتیب توان های اکتیو و راکتیو تزریقی از TCPS به شین Pام. YPq ادمیتانس کل خط انتقال متصل بین شین Pام وqام.
Pqθ زاویه ادمیتانس خط انتقال بین شین Pام وqام. NB تعداد کل شین ها، NTCPS تعداد ادوات(دستگاه های TCPS) متصل به شبکه قدرت. در (16) مجموعه ای از محدودیت های عملکرد سیستم که محدودیت های آن به شرح زیر ذکر شده است…..
توان اکتییو و راکتیو خروجی ژنراتور
توان اکتیو وراکتیوخروجی ژنراتور بخش Pام که بین حداقل و حداکثر است به شرح زیره: [15,20]

PGPmin,pGPmax حداقل و حداکثر توان اکتیو واحد تولیدی pام، QGPmin,QGPmax حداقل و حداکثر توان راکتیو ژنراتورواحدpام.
اندازه ولتاژ هرشین درشبکه
ولتاژ شین بار بین حداقل و حداکثر است: [15,20] ![]()
VLPmin,VLPMAX حداقل و حداکثر ولتاژ شین بار Pام.
Tab تنظیم ترانسفورماتور
شیر تنظیم ترانسفورماتور بین حداقل وحداکثر به شرح زیر است:[15,20]
![]()
TPmin,TPmax حداقل و حداکثر محدوده تنظیمات ترانسفورماتور.
محدوده شنت جبرانساز VAR

در اینجا QCPmin,QCPmax حداقل و حداکثر VARتزریقی به خازن شنت Pام.
خطوط انتقال بار(خطوط انتقال در حال بارگذاری)
جریان خط از طریق هر خط انتقال باید در محدوده ظرفیت آن باشد و این ممکن است به شرح زیر باشد:

در اینجا SLP,SLPmax توان ظاهری از شاخه Pام و حداکثر توان ظاهری شاخه Pام است.
محدوده راکتانس TCSC
محدوده حداقل وحداکثر راکتانس TCSC: ![]()
در اینجا XTPmin,XTPmax حداقل وحداکثرTCPS Pام وNTCSC تعداد دستگاه TCSC نصب شده در سیستم قدرت است.
محدوده تغییر فازTCPS
تغییر فاز TCPS در حداقل و حداکثر محدوده داده شده باشد. 
TPMin,maxᶲ حداقل وحداکثر زاویه نغییر فاز TCPS pام.و NTCPS تعداد دستگاه TCPSنصب شده در سیستم قدرت است.
تابع هدف.
در این مقاله، چهار تابع هدف مختلف به طور جداگانه در نظر گرفته،برای تعیین برتری و اثربخشی الگوریتم ارائه شده است. این تابع هدف در بخش بعدی به چهار قسمت تبدیل میشود.
به حداقل رساندن هزینه سوخت
در این تحقیق شبیه سازی،هزینه تولید کل به عنوان یک تابع هدف در نظر گرفته شده، هزینه های سوخت در نظر گرفته دراین مقاله ، به طور عمده، از دو نوعند یعنی(a)هزینه سوخت با تابع هزینه درجه دوم و(b) هزینه سوخت با اثر نقطه بارگذاری. هزینه سوخت با تابع هزینه درجه دوم. هزینه سوخت کل و واحد تولیدی تابع هزینه درجه دوم بدون اثر نقطه دریچه داده شده است.[37,38]

ap,bp,cp ضرایب هزینه سوخت ژنراتورpام هستند. هزینه سوخت با اثر شیر نقطه در حال بارگذاری.
در ژنراتور عملی، توربین های بخار دریچه های متعدد ممکن است گنجانیده شده باشد برای رسیدن به عملی دقیق تر و قابل انعطاف است و بنابراین، اثر نقطه دریچه نیز باید در نظر گرفته شود برای نمایش تابع هزینه دقیق. کل هزینه تولید واحد با اثر نقطه دریچه بارگذاری به عنوان ارائه شده: 
در اینجا dP,eP ضرایب هزینه سوخت با نقطه دریچه اثر بارگذاری ژنراتور مسیر هستند.
به حداقل رساندن تلفات انتقالی.
فرمول ریاضی از این نوع تابع هدف است به صورت زیر است: حداقل تلفات: 
در اینجا Ploss تلفات توان کل است وGK کاندوکتانس خط kام است و بین شین های pام وqام است.
به حداقل رساندن انتشار:
فرمول ریاضی این تابع به این صورت است: ![]()
که در اینجا E(p)g انتشارکل است. واحد تولید گرمایی آلایندههای جوی مانند اکسیدهای نیتروژن استNOx. واکسیدهای گوگردی،Sox. که می تواند به طور جداگانه مدل شود.اما به خاطرمقایسه انتشار کل این آلاینده (حاصل جمع دو تابع درجه دوم و نمایی است) که ممکن است به این عنوان باشد [14,15

که pα و βp وpƔ وpɳ وpג ضرایب انتشار ژنراتور pام هستند.
به حداقل رساندن هزینه های اقتصادی و زیست محیطی همراه
مشکل OPFانتشار ترکیبی از هزینه های زیست محیطی و اقتصادی است. در این مورد، هردو مشکل اقتصادی و زیست محیطی بوده که تبدیل میشود به یک هدف برای مشکل بهینه سازی که اونم ضریب قیمت جریمه(PF) [37] و به این عنوان شرح میگردد : ![]()
دراینجا OF(FU,E) معادل ترکیب هزینه های زیست محیطی و اقتصادی است که فرمول آن به صورت زیر است:[15,20] 
الگوریتم کریل هرد[21] براساس رفتار توده وار کریل ها در پاسخ به بیولوژی و زیست محیطی خاص است. عنوان KHA یک ابتکاری است، که به دو ویژگی اصلی ممکن است در اینجا اشاره کرد به عنوان، یکی اکتشاف یا جستجوی تصادفی است و دیگر بهره برداری و یا جستجوی محدود است. ترکیبی از این دو عامل نقش بسیار مهمی برای دستیابی به بالاترین عملکرد در حل مسئله بهینه سازی است.
در KHA، تابع هدف، به طور عمده، به عنوان فاصله از مواد غذایی از هر کریل است وبالاترین تراکم جمعیت. این موقعیت وابسته به زمان از هر krill توسط سه فرآیندهای اصلی تعیین میشود:[24]
(a حرکت ناشی از سایر کریل ها.
(b فعالیت تغذیه(جستجوغذا)
(c انتشار تصادفی.
KHAمنظم ممکن است در مدل لاگرانژی در n فاصله بعدی به صورت زیر عنوان شود:[21]

که در آن Vinewحرکت ناشی از سایر کریل هاست، VFinew حرکت جستجوی غذا، VDinew انتشار فیزیکی ازهرکریل.
حرکت ناشی از سایرکریل هادر این فرایند، هر کریل سعی می کند برای حفظ تراکم بالا و سرعت بالا توسط جنبش دیگران را تحت تاثیر قرار دهد. جهت حرکت ناشی ازiѱ است. ارزیابی توسط سه اثر یعنی1) تاثیر حدودی(تقریبی) 2) تاثیر هدف ،3) اثر دافعه.
دراینجا Vimax حداکثر حرکت(ناشی از)α وزن اینرسی است این حرکت در محدوده (رنج0 و1)Viold حرکت ناشی از کریل قبلی است، Zw,Zb[9] این بدترین وبهترین موقعیت krill ها در میان همه جمعیت است. و Zi , Zj مقدار تناسب (سازگاری) افراد i ام و j ام هستند. ns تعداد کریل هاغیر ازآن کریل خاص است. i ,imax این تعداد تکرار فعلی و حداکثر تعداد تکرارهای ، و xموقعیت را نشان میدهد.
برای تعیین فاصله هر کریل و از همسایگان، یک پارامتر به نام سنجش فاصله Ds استفاده شده است.
فرمول فاصله سنج: 
در این فرمول Ni تعداد کل krillهای فرد است. و xk موقعیت krill kام است. لازم به ذکر است که اگر فاصله بین دو کریل فرد دارای مقدار کمتری نسبت به فاصله سنج داشته باشند آنها همسایه هستند.
فعالیت جستجوگری(جستجوی تغذیه)
فعالیت جستجوگری بر دو عامل اصلی است. اول این است که محل غذا حاضر و دوم اطلاعات مربوط به محل غذا قبلی است. سرعت جستجوی غذا ممکن است برای بیان کریل فرد بشرح زیر است:[21]

αfوزن اینرسی حرکت یافتن تغذیه است. VFinew ,VFiold حرکت یافتن تغذیه از krill iام،به ترتیب.
انتشار تصادفی
فرایند انتشار تصادفی ازکریل فرد است، به طور عمده درنظرگرفته به منظورافزایش تنوع جمعیت.[21]
![]()
که در این فرمول Dimax حداکثر سرعت انتشار است،ξ بردار جهت تصادفی بین محدوده [-1,1]است.
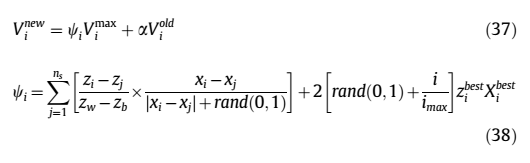
به روز رسانی موقعیت
در این فرایند، هر کریل تغییر می دهد موقعیت فعلی خود را و حرکت به موقعیت بهتر بر اساس حرکت القایی و حرکت جستجوی تغذیه و حرکت انتشار تصادفی.
با توجه به تجزیه و تحلیل سه حرکت بالا، موقعیت به روز شده از هر کریل iام ممکن است به این عنوان بیان شده است:[22]

دراینجا nd تعداد کل متغیر است. uj و lj. حدود بالا و پایین تر از متغیرهای q ام هستد. [j=1,2,….,nd]. و PC تعداد موقعیت ثابت بین [0،2] است.
به منظور بهبود عملکرد مسئله بهینه سازی و افزایش سرعت ویژگی همگرایی، تقاطع و حرکت روند الگوریتم DE در KHA گنجانیده شده است.[21]
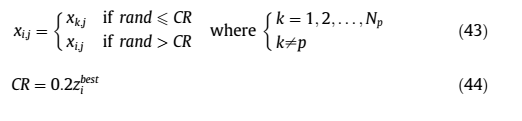
تقاطع
روند متقاطع است، به طور عمده، توسط یک پارامتر کنترل می شود. نامیده می شوند به عنوان احتمال متقاطع.
برای به روز رسانی موقعیت krill ، هر فرد رابطه با دیگران است.
در این فرایند، j ام بخشی از krill i ممکن است به عنوان [31]:
جهش،تغییر،حرکت
فرآیند جهش، به طور عمده، کنترل شده توسط یک پارامتر(به نام احتمال جهش). فرمول آن: .

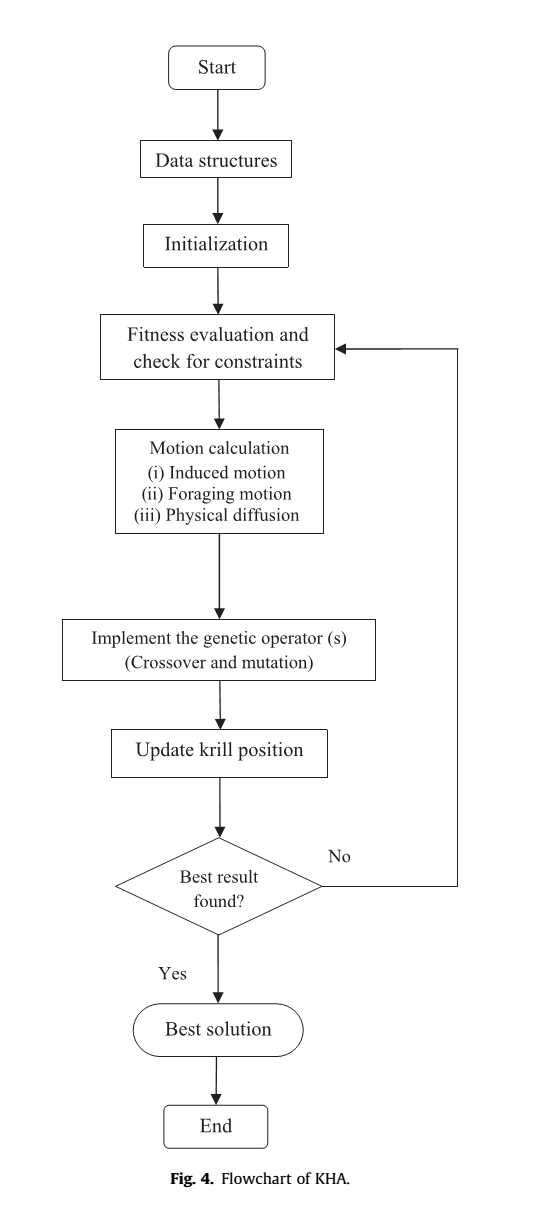
روش محاسباتی
این فلوچارت kha نشان داده شده در شکل 4. روش محاسباتی این الگوریتم در الگوریتم 1 نشان داده شده.
الگوریتم1: روش محاسباتی برای KHA
Step 1 مقداردهی اولیه . پارامترهای تنظیم Np اندازه جمعیت است، NFFEmax ، Vimax حداکثر سرعت ناشی ازعاملی، VF سرعت جمع آوری آذوقه میپردازند. VDinew حداکثر سرعت انتشار،
Step 2 ارزیابی تناسب، تولید به صورت تصادفی تعیین موقعیت هر فرد کریل و ارزیابی مقدار تابع تناسب اندام برای هر فرد کریل.
Step 3 حلقه while در حالی که معیارهای فسخ است راضی نیست و یا t<NFFEmax ،do ،
مرتب کردن بر اساس جمعیت از بهترین به بدترین.
حلقه for ،i=1: NP (همه جمعیت)، do محاسبه حرکات زیر؛
(a عامل حرکت.
(b حرکت تغذیه
(cانتشار فیزیکی
به روز رسانی موقعیت فردی کریل در فضای جستجو. ارزیابی هر یک از کریل فردی با توجه به آن
موقعیت جدید.
End for
جایگزینی با بهترین ارزش آن را . مرتب کردن بر اساس جمعیت از بهترین به بدترین و پیدا کردن فعلی بهترین.
t=t+1
STEP4 End while.
STEP5 پس از پردازش از نتایج.
نتیجه گیری:
در این مقاله، یک الگوریتم فرا ابتکاری جدید مثل OKHA ارائه شده است برای حل مشکل OPF سیستم قدرت گنجانیده شده با ادوات. FACTS.
چهار توابع هدف مختلف یعنی:
الف) به حداقل رساندن هزینه سوخت، (ب) به حداقل رساندن توان اکتیو انتقالی، (ج) کاهش انتشار( و
د(ترکیب مسئله به حداقل رساندن هزینه اقتصادی و زیست محیطی تنظیم شده، به صورت جداگانه،) با توجه به معادلات و محدودیت های نامعادلات است.
نتایج شبیه سازی ارائه شده توسط هر دو OKHA و KHA باهم مقایسه شده اند، گزارش مقایسه نشان داده است که بازده بهتر، استحکام، پایداری و نرخ همگرایی سریع در حالی که از OKHA پیشنهادی دست آمده است.
بنابراین، آن را به صراحت در این مقاله که این الگوریتم جدید ممکن است بسیار امیدوار کننده و تشویقی برای کارهای تحقیقاتی آینده نشان داده است.
به عنوان برخی از حوزه های دیگر در کار آینده، در زیر اشاره شده است:
- ترکیب هزینه های اقتصادی و زیست محیطی و تلفات توان اکتیو انتقالی در این کار به صورت جداگانه در نظر گرفته شده، با این حال، این دو ممکن است با هم ترکیب و به شکل یک تابع هزینه واحد که ممکن است به حداقل برسد دربیایند.
ap, bp, cp ضرایب هزینه سوخت ژنراتور pth است.
dp, ep ضرایب هزینه سوخت با اثر نقطه شیر بارگذاری ژنراتور pth
E(Pg) کل میدان مغناطیسی
FC کل هزینه سوخت واحدهای تولید
g(u, v) معادل محدودیت دستگاه
Gk کاندوکتانس خط متصل بین شین های pام و qام.
Gpq, Bpq کاندوکتانس و سوسپتانس بین شین pام وqام به ترتیب.
h(u, v) مخالف مجموعه ای از محدودیت ها.
NB تعداد کل شین
Nc تعداد بانک های خازنی
NL تعداد خطوط انتقال
NPQتعداد شین بار
NPVتعداد شین ژنراتور
NT تعدادشیر تنظیم ترانسفورماتور
N TCPS تعداد دستگاههای TCPS نصب شده در آزمایش سیستم قدرت .
NTCSC تعداد دستگاههای TCSC نصب شده در آزمایش سیستم قدرت
of تابع هدف به حداقل برسد
OF(FU, E) ترکیب هزینه های اقتصادی زیست محیطی.
PGp, QGp تولید توان اکتیو و راکتیو از شین P ام، به ترتیب.
PGPmin,PGPmax محدودیت حداقل وحداکثرتوان اکتیوازواحدتولید Pام،به ترتیب
PLoss کل تلفات توان
PLP, QLP توان اکتیو و راکتیو مورد نیاز از شین Pام، به ترتیب
Ppk, Qpk تزریق توان اکتیو و راکتیو از TCPS به شین Pام، به ترتیب
Ppq, Qpq جریان انتقال توان اکتیو و راکتیو از شین Pام به شین qام به ترتیب.
- در واقع سیستم های FACTS قادر هستند که پارامترها و مشخصه های خطوط انتقال مانند امپدانس سری، امپدانس شانت، زاویه فاز که بعنوان محدودیت اصلی بر سر راه افزایش ظرفیت شبکه عمل می نمایند، کنترل کنند. در واقع FACTS دارای نقش اساسی در افزایش انعطاف پذیری انتقال توان وامنیت پایداری دینامیک سیستم های قدرت می باشد. منبع :WWW.NOISE1.BLOG.IR ↑
- krill herd algorithm معروف به الگوریتم گروه میگوه ها نوعی کد نویسی در برنامه متلب است. الگوریتم Krill Herd یا الگوریتم کریل ها یا الگوریتم میگو ها توسط امیر حسین گندمی و امیر حسین علوی در سال ۲۰۱۲ برای بهینه سازی مدل ریاضی ارایه گردید. الگوریتم Krill Herd جز الگوریتم های هوش ازدحامی دسته بندی می شود و حرکت دسته جمعی کریل ها را برای یافتن غذا مورد بررسی قرار داده است . ↑
- Krill herd algorithm ↑
- دانلود کردم در پوشه سمینار است. ↑
- مرجع 30 دانلود گردد. ↑
- opposition based learning یادگیری مبتنی بر مخالفت ↑
- thyristor controlled series capacitor ↑
- thyristor controlled phase shifter ↑
- Worst and best ↑
کلید واژه:پروژه متلب,شبیه سازی بامتلب
FACTS devices, Krill herd algorithm, Opposite number, Optimal power flow, Optimization
[1] در واقع سیستم های FACTS قادر هستند که پارامترها و مشخصه های خطوط انتقال مانند امپدانس سری، امپدانس شانت، زاویه فاز که بعنوان محدودیت اصلی بر سر راه افزایش ظرفیت شبکه عمل می نمایند، کنترل کنند. در واقع FACTS دارای نقش اساسی در افزایش انعطاف پذیری انتقال توان وامنیت پایداری دینامیک سیستم های قدرت می باشد.
[2] krill herd algorithm معروف به الگوریتم گروه میگوه ها نوعی کد نویسی در برنامه متلب است. الگوریتم Krill Herd یا الگوریتم کریل ها یا الگوریتم میگو ها توسط امیر حسین گندمی و امیر حسین علوی در سال ۲۰۱۲ برای بهینه سازی مدل ریاضی ارایه گردید. الگوریتم Krill Herd جز الگوریتم های هوش ازدحامی دسته بندی می شود و حرکت دسته جمعی کریل ها را برای یافتن غذا مورد بررسی قرار داده است .
شبیه سازی مقاله Solution of optimal power flow with FACTS devices using a novel oppositional krill herd algorithm
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.