توضیحات
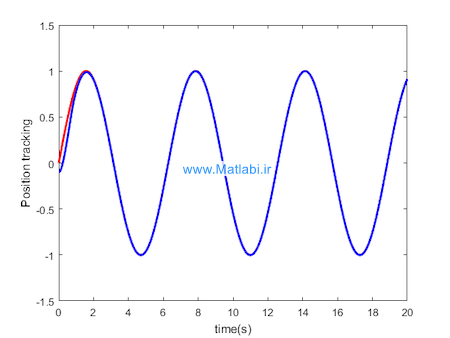
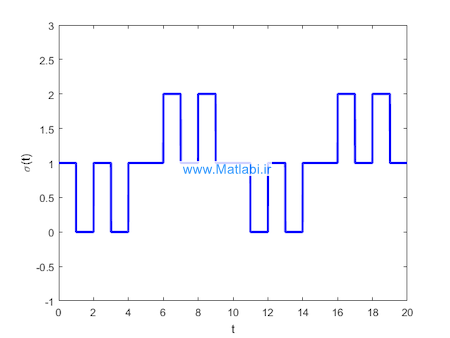
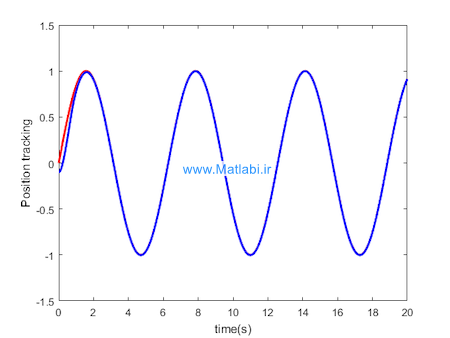
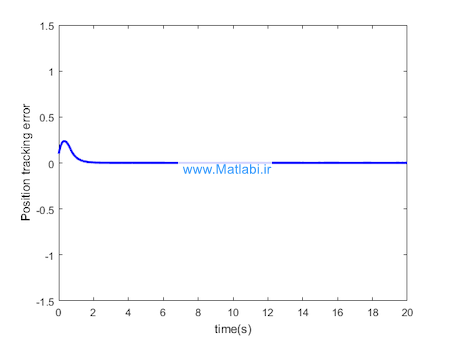
Sliding Mode Switching Control of Manipulators Based on Disturbance Observer
شبیه سازی در محیط سیمولینک و ام فایل متلب پیاده سازی شده است.
دارای گزارش 4صفحه ای از شبیه سازی در قالب ورد است.
فایلهای پیاده سازی شده به شرح زیر هستند:
1- فایل Main.m که با اجرای آن کلیه نتایج شبیه سازی ترسیم می شود.
2- فایل RobotModel.m که مدل سیستم را پیاده سازی می کند.
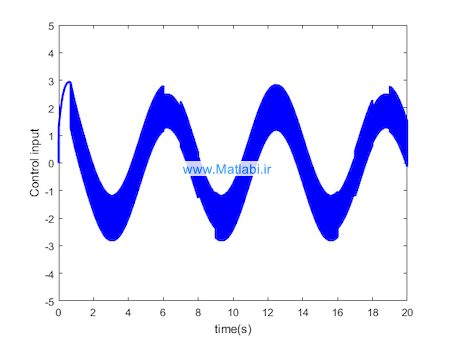
3- فایل SMCController1.m که کنترلر را در حالت بدون روئیت گر اغتشاش پیاده سازی می کند.
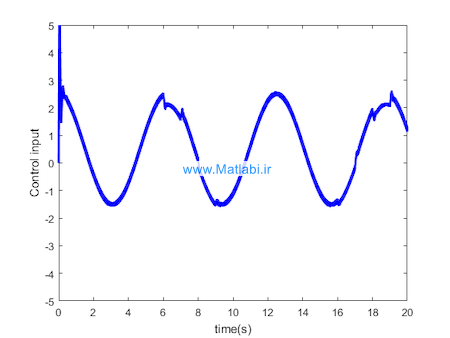
4- فایل SMCController2.m که کنترلر را در حالت با روئیت گر اغتشاش پیاده سازی می کند.
5- فایل سیمولینک SMCROBOT1.slx برای پیاده سازی شبیه سازی بدون روئیت گر اغتشاش
6-فایل سیمولینک SMCROBOT2.slx برای پیاده سازی شبیه سازی با روئیت گر اغتشاش
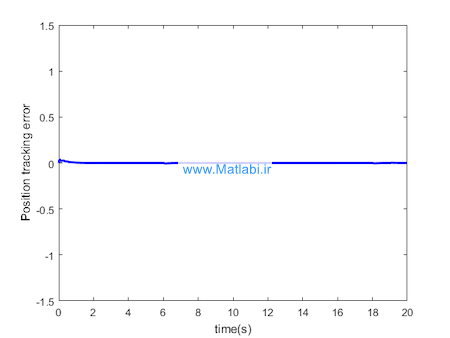
نتایج شبیه سازی با متلب


کلیدواژه:
Sliding mode switching control, Average dwell-time method, Disturbance observer, Lyapunov theory
شبیه سازی
Sliding Mode Switching Control of Manipulators Based on Disturbance Observer
توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.