توضیحات
Sliding-mode observer for speed-sensorless induction motor drives
طراحی رویتگر مد لغزشی برای موتور القایی
طراحی رویتگر مد لغزشی برای موتور القایی
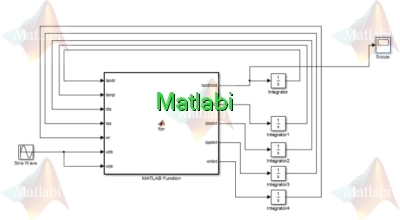
با توجه به معادلات موتور القایی (1)، مدار زیر شبیه سازی سیستم را به ازای ورودی سینوسی نشان می دهد. معادلات به صورت خطی بوده و سیستم در حالت کلی ناپایدار است.
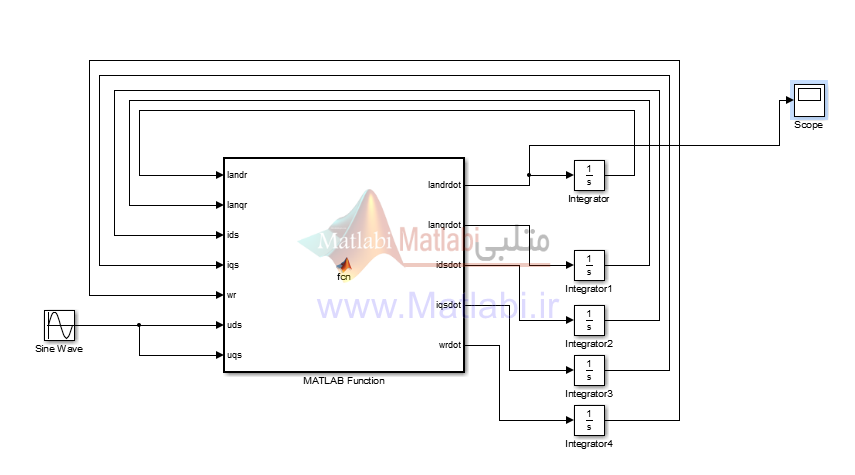
شکل (1) – مدل شبیه سازی شده در سیمولینک
با در نظر گرفتن خروجی جریان (در فضای d , q) ، جهت پایدار سازی مدل برای طراحی رویتگر از یک کنترلر PID به صورت شکل 2 استفاده می شود.
در این مدار ضرایب به صورت بهینه بدست آمده اند. شکل 3 پاسخ سیستم را در حضور PID نشان می دهد.
….
شکل (2) – شبیه سازی سیستم حلقه بسته در حضور کنترلر PID
شکل (3) – پاسخ سیستم حلقه بسته
شکل 4 شبیه سازی سیستم در محیط سیمولینک را نشان می دهد.
رویتگر استفاده شده در این فایل رویتگر مدلغزشی می باشد که به صورت مرتبه اول در نظر گرفته شده است.
به دنبال ایده طراحی رویتگر و ایجاد مفهوم حساسیت، مد لغزشی با در نظر گیری کرانی بر روی سیستم سیگنال تخمینی را ایجاد خواهد نمود که نسبت به عدم قطعیت ها و اغتشاش دارای مقاومت بالایی می باشد.
یکی ازمهمترین دلایل استفاده از رویتگر مد لغزشی افزایش مقاومت در برابر عدم قطعیت ها می باشد.
علت مقاومت مد لغزشی استفاده از ترم سوییچبینگ در ساختار متغیر کنترلی می باشد.
…
شکل(4) – مدار شبیه سازی سیستم در حضور رویتگر
.
…
شکل(5) – بلوک Sliding Mode
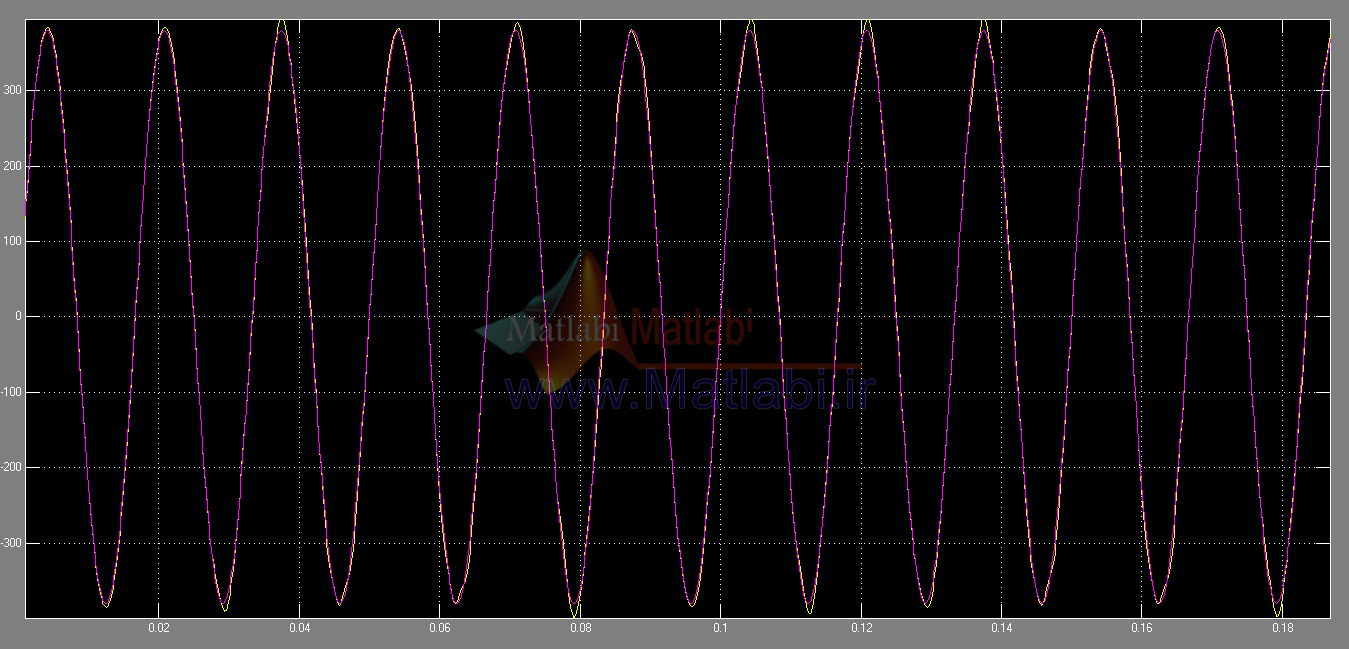
شکل(6) – خروجی تخمین زده شده و خروجی واقعی سیستم
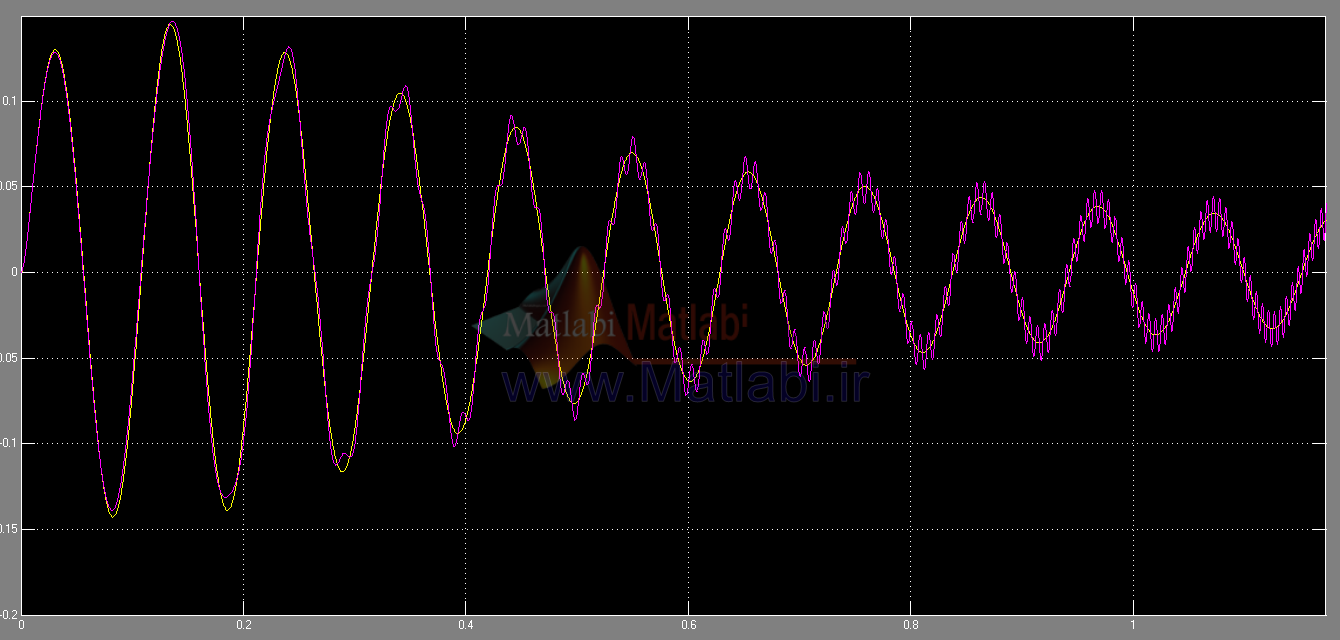
شکل 6 و شکل 7 سیگنالهای تخمین زده شده را نشان می دهد. در مقاله اصلی شبیه سازی به طور عملی و به وسیله چیپDSP آزمایش شده است و شکل موج های اصلی و تخمینی برای همه حالات رسم گردیده اند. روند تخمین و طراحی رویتگر برای سایر حالات مشابه با دو حالت بدست آمده می باشد.
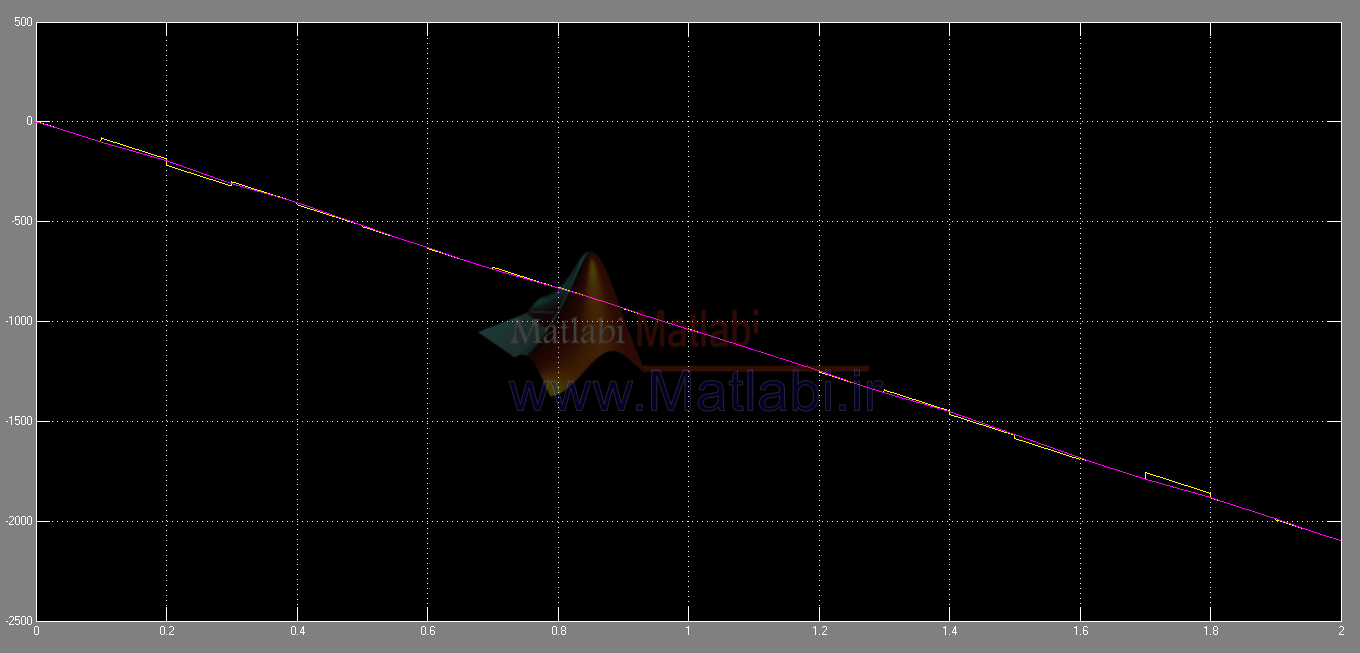
شکل(7) – خروجی تخمین زده شده و خروجی واقعی wr
کلید واژه:شناسایی سیستم کنترلی






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.