توضیحات
Sliding mode control for chaotic permanent magnet synchronous motor drive system
کنترلکنندهی مدلغزشی برای سیستم درایو موتور سنکرون مغناطیس دائم با آشوب
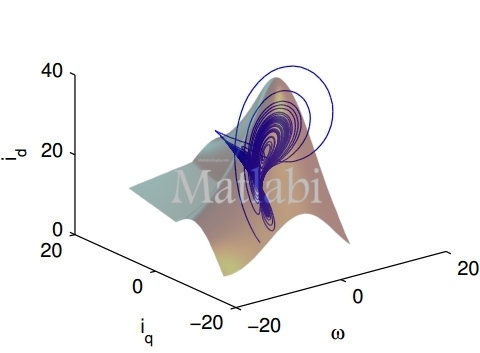
ناحیه جذب این آشوب به صورت زیر میباشد.(در اینجا U صفر است و هنوز کنترلری به سیستم اعمال نشده است.)

حالت های سیستم نیز در زمانی که ورودی کنترلی اعمال نشدهاست به صورت زیر میباشند.

طراحی کنترلکنندهی مدلغزشی
اساس طراحی کنترلرهای غیرخطی تابع لیاپانوف میباشد. در این مقاله تابع لیاپانوف به صورت زیر در نظر گرفته شده است.
به همین دلیل سطح لغزش به صورت زیر تعریف میگردد.
…
که با توجه به تابع لیاپانوف بالا و مشتق آن داریم:
…
که برای ایجاد چنین تابعی باید ورودی کنترلی به صورت زیر باشد.
…
با اعمال ورودی به معادلات حالت سیستم رابطه ی (1) معادلات حالت به صورت زیر تبدیل میشوند. (با در نظر گرفتن شرایط اولیه ای که در بالا تعریف شده معادلات حالت به صورت زیر ساده شده اند.)
…
که دقیقا میشود. اما دلیل اضافه نمودن ترم به ایجاد یک ترم گسسته به قسمت کنترل پسخورد برای مقاوم نمودن کنترلر است.
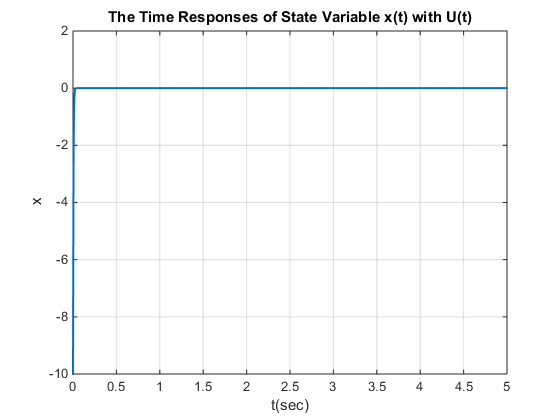
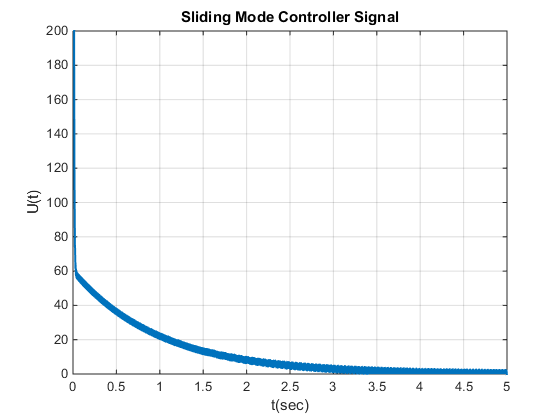
نتایج حاصل بعد از اعمال کنترلر به صورت زیر میباشد.



با خرید این محصول فایل های شبیه سازی شده با متلب و گزارش شامل روابط و توضیحات فوق ارائه خواهد شد.
کلید واژه :
sliding mode control, chaotic systems, permanent magnet synchronous motor
شبیه سازی با متلب ,پروژه های اماده متلب, matlab,matlab project,پروژه متلب,
شبیه سازی مقاله
Sliding mode control for chaotic permanent magnet synchronous motor drive system
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





