توضیحات
Sliding mode based load-frequency control in power systems
اسلایدینگ مود مبتنی بر کنترل فرکانس بار در سیستم های قدرت
بخش هایی از گزارش در اینجا آمده است:
در این گزارش، شبیه سازی کنترل load-frequency برای سیستمهای توان هیدروترمال ارائه شده است.
روش کنترلی به کار گرفته شده، روش مد لغزشی میباشد که به صورت دیجیتال طراحی شده است.
به منظور شبیه سازی از نرمافزار Matlab به همراه محیط Simulink استفاده شده است.
متأسفانه، بعد از انجام شبیه سازی، مشخص گردید که مرجع معرفی شده دارای خطاهایی میباشد که امکان پیاده سازی روشهای ارائه شده به صورت کامل را فراهم نمی آورد.
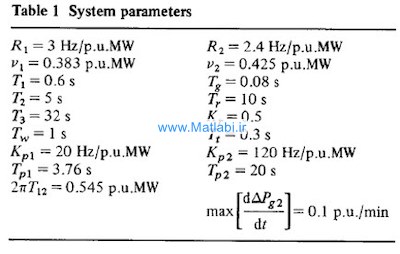
با توجه به اینکه، در متن مقاله اشاره شده است که از پارامترهای ارائه شده در مرجع [29] استفاده شده است، این مرجع نیز جهت حصول اطمینال بر خطاهای موجود در مقاله، مورد بررسی قرار گرفت.
هر دو مقاله از روش کنترلی مد لغزشی بهره گرفته اند که مقاله در دسترس، روش طراحی دیجیتال نیز ارائه شده است.
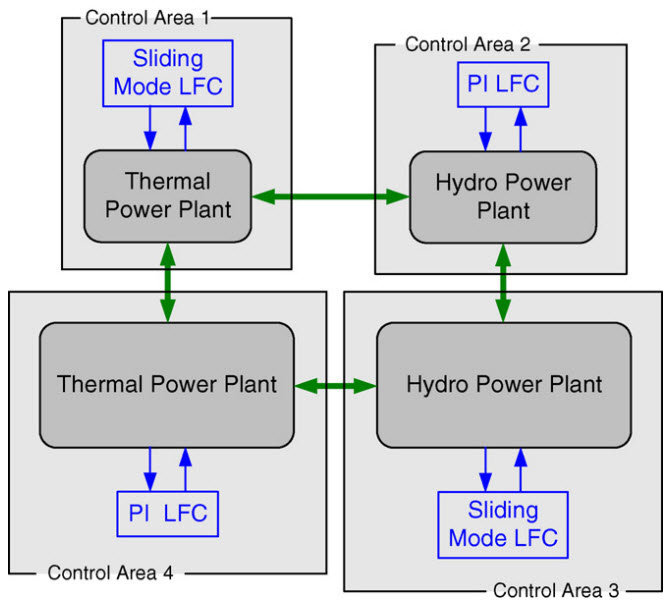
در مرجع [29]، مدل یک سیستم هیدروترمال متصل به هم معرفی شده است که بلوک دیاگرام سیستم به صورت زیر میباشد،
شکل 1
در مرجع موجود نیز از دو سیستم توان هیدرو و دو سیستم توان ترمال که با ساختار مشخصی متصل به هم میباشند استفاده شده است.
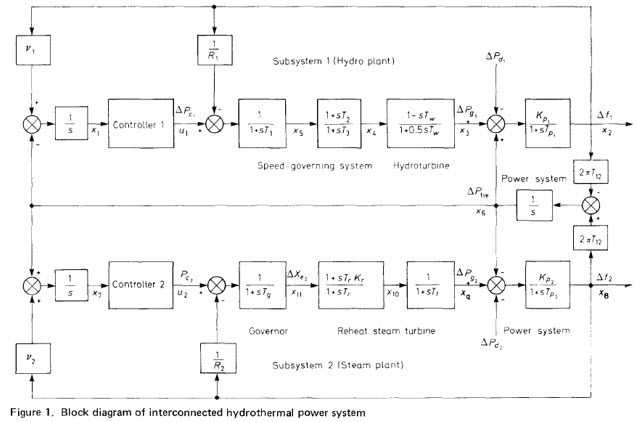
بلوک دیاگرام ارائه شده برای سیستم هیدرو که مقادیر پارامترهای آن از مقادیر مرجع [29] استفاده شده است، به صورت زیر میباشد،
شکل 2
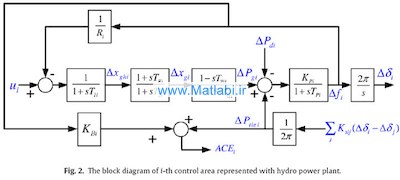
با توجه به متغیرهای همنام تعریف شده در دو سیستم و مقادیر پارامترهای تعریف شده در دو مرجع به شکل زیر
وجود خطا در مرجع موجود مشهود میباشد.
نتایج شبیه سازی با متلب
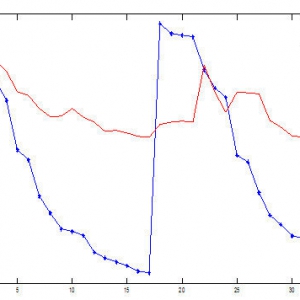
پاسخ سیستم ارائه شده در مرجع [29] برای کنترل کننده بهینه طراحی شده برای سیستمهای هیدرو و ترمال به صورت زیر میباشد،
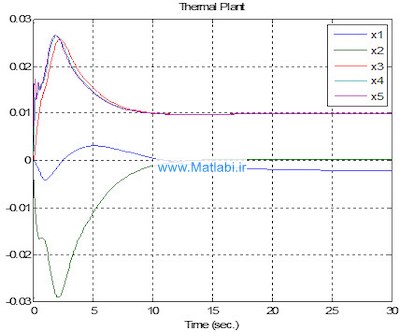
شکل 3
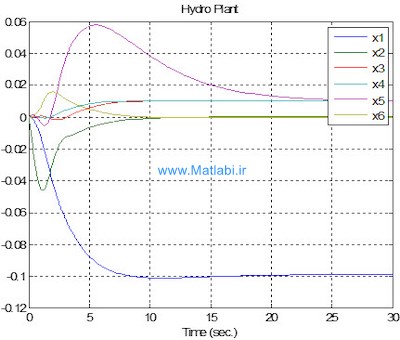
شکل 4
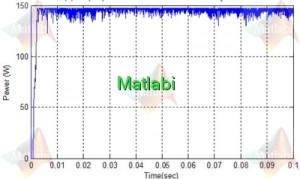
در شبیه سازی روش کنترلی مدل لغزشی برای مرجع [29]، پاسخ سیستم به صورت گسسته مورد بررسی قرار گرفته است به این ترتیب که فرکانس نمونه برداری سیستم 1 کیلو هرتز و فرکانس اعمال ورودی کنترلی 50 هرتز میباشد.
نتایج حاصل به صورت زیر میباشد
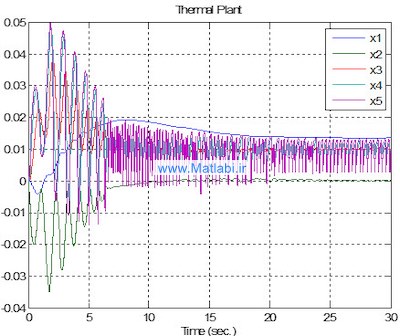
شکل 6
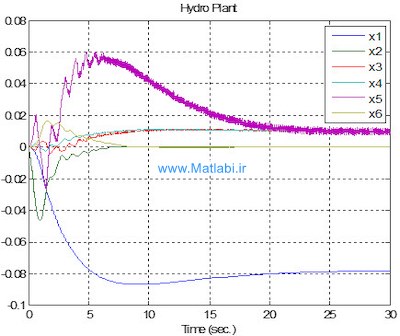
شکل 7
متأسفانه شبیه سازی های مشابه برای مرجع اصلی نتایج ناپایداری از سیستم ارائه میکنند که همانطوری که نشان داده شده، به دلیل بیان ناصحیح پارامترهای سیستم و همچنین مدل فضای حالت سیستم میباشد برای زیر سیستمهای توان هیدرو میباشد.
بنابراین برای شبیه سازی تنها زیر سیستمهای ترمال مورد بررسی قرار گرفته است.
از طرفی برای اعمال روش کنترلی مد لغزشی ارائه شده در این مقاله، نیاز به استفاده از یک تبدیل به منظور اراده معادلات حالت سیستم به صورت منظم (regular form) میباشد.
در رابطه (49) تبدیل لازم برای زیر سیستم هیدرو ارائه شده است و همچنین ذکر شده است که معادلات سیستم ترمال به صورت منظم میباشد و بنابراین ماتریس تبدیل مورد نظر به صورت قطری واحد لحاظ شده است.
اما، این روابط برای معادلات سیستم در حالت پیوسته میباشد و در حالت گسسته معادلات سیستم ترمال منظم نمیباشد.
بنابراین ماتریس تبدیل لزوماً قطری واحد نبوده و نیاز به طراحی دارد که در شبیه سازیهای مقاله به اعداد استفاده شده اشاره نشده است.
به منظور شبیه سازی، سیستم تعریف شده توسط روابط (5)، (6) و (8) و مقادیر پارامترهای ارائه شده در جدول (5) استفاده شده است.
جهت گسسته سازی، مقاله موجود از رابطه (10) استفاده کرده است.
نتایج حاصل برای خروجی ACE1 با کنترل کننده SMC و PI و همچنین خروجی ACE4 با کنترل کننده PI 
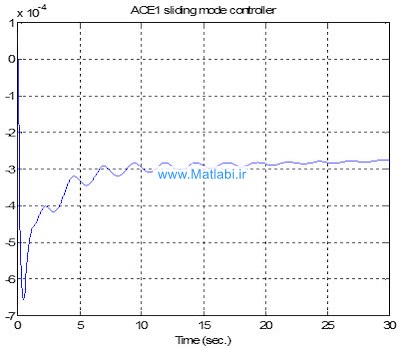
شکل 10
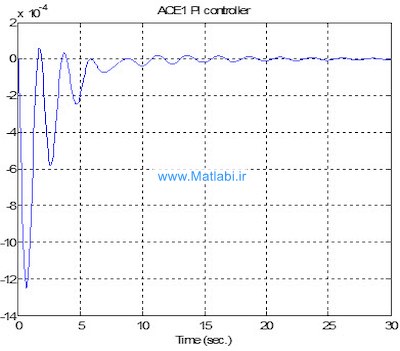
شکل 11
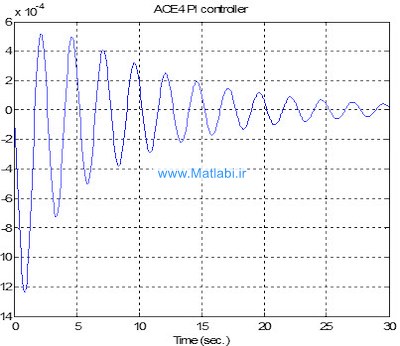
شکل 12
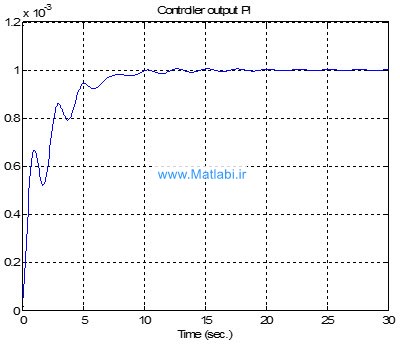
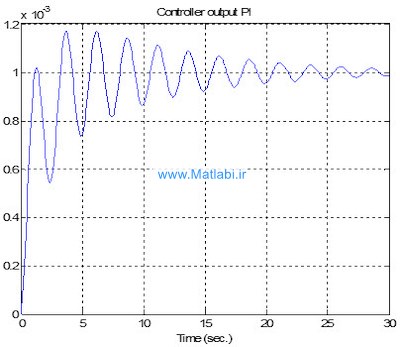
سیگنالهای کنترلی نی به ترتیب به صورت زیر میباشند
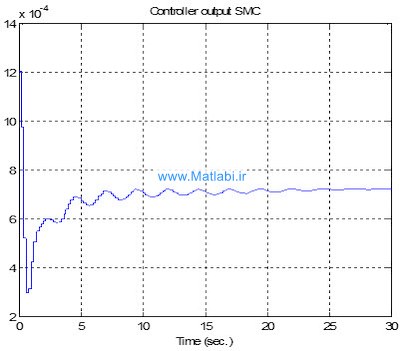
شکل 13
شکل 14
شکل 15
در فایل هایی که خریداری می نمایید هیچگونه نامی از سایت متلبی وجود ندارد.
کلید واژه : کیفیت توان
Sliding mode control, Load-frequency control, Fast output sampling, Genetic algorithm, Uncertainties
شبیه سازی
Sliding mode based load-frequency control in power systems
طبق توضیحات فوق به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.