توضیحات
شبیه سازی کنترل کننده PID تنظیم خودکار فازی با Matlab
عنوان اصلی مقاله:
Simulation Research of Fuzzy Auto-tuning PID Controller Based on Matlab
شبیه سازی در محیط سیمولینک متلب انجام شده است. (شبیه سازی با متلب 2015 انجام شده است.)
دارای گزارش ویدیویی 20 دقیقه ای می باشد.
توضیحات پروژه کنترلر PID تنظیم خودکار فازی
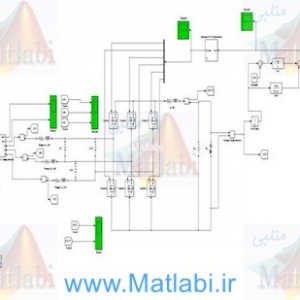
سیمولینک بر اساس شکل 4 مقاله انجام شده است و خروجی شبیه سازی شامل شکل های 5 و 6 مقاله می شود.
در ویدیو همراه با شبیه سازی, توضیح در مورد نحوه شبیه سازی داده شده است. حتی نحوه ساخت فایل فازی و آوردن بلوک های سیمولینک نیز در این ویدیو داده شده است.
نتیجه شبیه سازی با متلب:

شکل بالا همان شکل 5 مقاله یعنی Fig.5 step function response of conventional PID controller است.
شکل پایین نیز شکل 6 مقاله یعنی Fig.6 step function response of parameter fuzzy self-tuning PID controller است.
همانطور که مشاهده می شود خروجی کنترلر PID دارای نوسان زیاد است. ولی کنترلر PID فازی خیلی سریع به نتیجه مطلوب می رسد با کمترین نوسان.
شاید به موارد زیر نیز علاقه مند باشید:
- تنظیم خوکار, کنترل کننده PID گسسته برای مبدل dc-dc برای پاسخ سریع گذرا
- تنظیم بهینه کنترل کننده PID بر روی سیستم چند متغیره خلبان خودکار طولی هواپیما براساس الگوریتم اجتماع ذرات (PSO)
- سیستم توزیع موتور سنکرون خطی مغناطیس دائم بر اساس کنترل PID فازی
-
A genetic fuzzy expert system for automatic question classification
کلیدواژه:
fuzzy PID controller, parameters on-line auto-tuning, Matlab Simulink, the electric steering gear
کنترل کننده PID فازی, تنظیم خودکار پارامترها, Matlab Simulink, چرخ دنده فرمان الکتریکی
شبیه سازی کنترل کننده PID تنظیم خودکار فازی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.