توضیحات
شبیه سازی و کنترل ترکیبی فازی-PID برای موقعیت یابی یک سیستم هیدرولیک
عنوان اصلی مقاله
Simulation and hybrid fuzzy-PID control for positioning of a hydraulic system
شبیه سازی در محیط سیمولینک متلب 2018 انجام شده است.
دارای گزارش ورد 11 صفحه ای می باشد.
مقدمه:
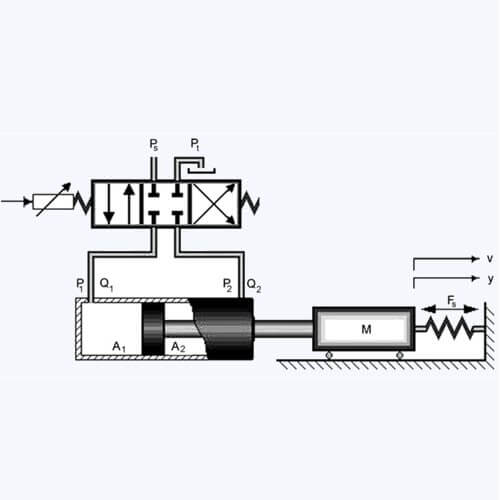
این مقاله در مورد مدلسازی و کنترل موقعیت یک سیستم فشار قوی است که شامل یک سیلندر هیدرولیک نامتقارن است که توسط یک سوپاپ نسبی چهار راه، سه موقعیتی کنترل میشود. در این مدل سیستم، مدول بالک به عنوان یک متغیر در نظر گرفته شده است.
به علاوه، کنترل کننده Hybrid Fuzzy-PID با قوانین متصل (HFPIDCR) برای کنترل موقعیت سیستم هیدرولیک پیشنهاد شده است و عملکرد آن توسط مطالعات شبیهسازی آزمایش شده است. جنبه جدید این کنترل کننده این است که منطق فازی و کنترل کننده PID را از طریق یک شرط سوئیچینگ ترکیب میکند. نتایج شبیهسازی کنترل کننده مبتنی بر HFPIDCR با نتایج PID کلاسیک، کنترل کننده منطق فازی (FLC)، و کنترل کننده Hybrid Fuzzy-PID (HFPID) مقایسه شده است1.
توضیحات پروژه کنترل ترکیبی Fuzzy-PID
برای این شبیه سازی، چهار مدل سیمولینک در متلب 2018b ساخته شده است. دلیل استفاده از سیمولینک این بود که در مقاله گفته شده از سیمولینک استفاده کرده. همچنین استفاده از ابزار فازی و PID در سیمولینک بهتر جواب می دهد.
نکته: شبیه سازی را حتما با استفاده از فایل main اجرا نمایید. زیرا در ابتدا یک سری متغیرها با فایل main خوانده می شوند و سپس در مدل های سیمولینک مورد استفاده قرار میگیرند. به علاوه چون باید نمودار هر 4 مدل یک جا رسم شود، در انتهای فایل main دستورات رسم نمودارها قرار داده شده است.
نکته: چهار مدل سیمولینک به شرح زیر ساخته شده است:
- روش HFPIDCR ( Hybrid FuzzyPID Controller with Coupled Rules) قسمت قرمز رنگ شکل زیر را پوشش می دهد (کاملترین مدل)
- روش HFPID ( Hybrid Fuzzy-PID controller) قسمت بنفش رنگ شکل زیر را پوشش می دهد
- روش Fuzzy قسمت سبز رنگ شکل زیر را پوشش می دهد
- روش PID قسمت نارنجی رنگ شکل زیر را پوشش می دهد

Hybrid Fuzzy—PID control with coupled rules structure
در گزارش ورد توضیح در مورد شبیه سازی داده شده است.
نتایج شبیه سازی با متلب
تمام فایلهای شبیه سازی با یک ام فایل با نام main.m قابل اجراست و نتایج در نهایت نمایش داده می شود.
با اجرای فایل main نتایج زیر ظاهر می شود. ملاحظه میشود که تعقیب سیگنال مرجع به خوبی انجام شده است.
کنترلرهای PID و فازی رفتاری مشابه دارند و سپس دو کنترلر ترکیبی رفتار بهتری دارند.
کنترلر HFPIDCR از همه عملکرد بهتری را نشان می دهد.
سایر نمودارها نیز رفتار تا حد قابل قبولی نزدیک مقاله دارند. دقت کنید از آن جا که در مقاله همه جزئیات آورده نشده است نمودارهای دیگر صد در صد منطبق نیستند ولی حدود آن ها و رفتار کلی آن ها خیلی به مقاله نزدیک می باشد.

Fig. 3 uv variation with e and de
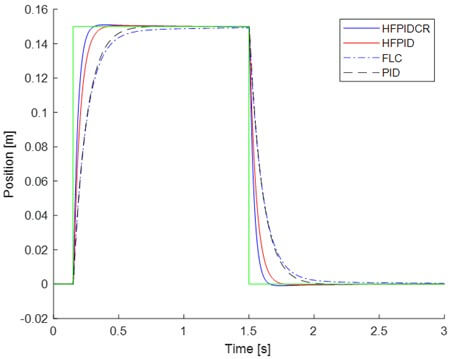
Fig. 6 Comparison of position responses

Fig. 7 Velocity response and control signal

Fig. 8 Pressure response of hydraulic cylinder

Fig. 9 Flow response of hydraulic cylinder
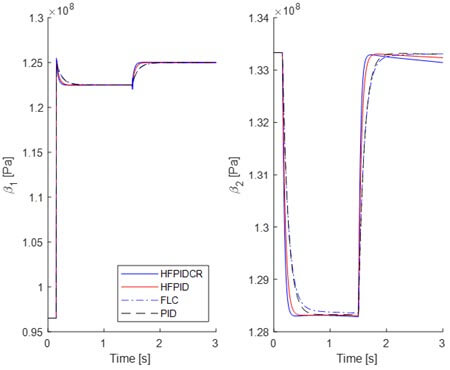
Fig. 10 Variation of Bulk modulus
شاید به موارد زیر نیز علاقه مند باشید:
- صرفه جویی در انرژی و کنترل موقعیت فازی-PID سیستم الکترو هیدرولیک با جبران نشتی از طریق شیر کنترل جریان متناسب
- کنترل قند خون با استفاده از کنترل کننده PID-فازی مبتنی بر الگوریتم ABC
- کنترل مودلغزشی ترکیبی برای میکروگریدهای DC رابط IFDBC با بارهای الکترونیکی قدرت
- تشخیص لبه با استفاده از منطق فازی در Matlab
- راهکار ارائه پیشنهاد تطبیقی بر اساس یادگیری-Q در حراجهای ترکیبی
کلیدواژه:
Hydraulic systems, Position control, Hybrid fuzzy-PID, Coupled rules
سیستمهای هیدرولیک, کنترل موقعیت, PID فازی ترکیبی
شبیه سازی و کنترل ترکیبی فازی-PID برای موقعیت یابی یک سیستم هیدرولیک با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.