توضیحات
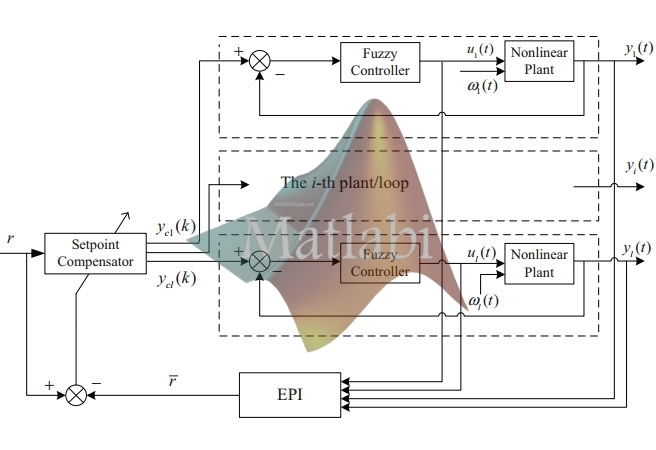
Setpoints Compensation for Nonlinear Industrial Processes with Disturbances Based on Fuzzy Logic Control
گزارش نتایج شبیه سازی پروژه
الف: مدل سازی ریاضی سیستم در محیط سیمولینک
با توجه به معادلات ارائه شده در مقاله، مدل سازی ریاضی سیستم به صورت زیر در محیط سیمولینک انجام شده است (model.slx):

بررسی رفتار سیستم به ازای ورودی دلخواه (u=2):

رفتار پارامتر x1

رفتار پارامتر x2
با توجه به خروجی سیستم پارامتر x2 رفتار این سیستم ناپایدار می باشد. بنابراین در ادامه به ارائه نتایج حاصل از اعمال کنترلر مبتنی بر مقاله پرداخته می شود.
ب، ارائه نتایج طراحی کنترلر مبتنی بر فازی
با توجه به کنترلر فازی طراحی شده در مقاله، رفتار سیستم در حضور کنترلر مورد بررسی قرار می گیرد (model_2.slx)
![]()
در مدل سیمولینک فوق، بلوک مربوط به کنترلر به صورت زیر می باشد:
…
پس از اجرای این مدل، رفتار سیستم به ازای setpoint برابر 0.5 مورد بررسی قرار می گیرد که نتایج آن به شرح زیر می باشد:

عدم توانایی سیستم در تعقیب تغییرات setpoint به صورت زیر نشان داده شده است (model_3.slx):
…
با اجرای فایل سیمولینک فوق، عدم توانایی کنترلر طراحی شده در تعقیب به صورت زیر نشان داده شده است:

جهت حل این مشکل، یک compensator در مقاله ارائه شده است.
ب، ارائه نتایج طراحی کنترلر مبتنی بر فازی + compensator:
به منظور تعقیب کامل، بخش compensator نیز به سیستم افزوده شد (model_4.slx)

پس از run این مدل، نتیجه زیر را خواهیم داشت که track کردن setpoint مشخص شده (65) را نشان می دهد.

سیستم کنترلر فوق برای بار دیگر در حالت تغییرات setpoint متناسب با زمان مورد تست قرار گرفته است (model_5.slx) که عملکرد مناسب آن در تعقیب در شکل زیر به وضوح به تصویر کشیده شده است:

نتیجه پس از اجرا:

جهت بررسی هر کدام از نتایج ارائه شده، فایل سیمولینک مربوط به همان قسمت را اجرا نمایید
کلید واژه : کنترلر مبتنی بر فازی, کنترلر مبتنی بر فازی , پروژه متلب, پروژه matlab , شبیه سازی با متلب+ compensator
شبیه سازی
Setpoints Compensation for Nonlinear Industrial Processes with Disturbances Based on Fuzzy Logic Control
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





