
توضیحات
Self-Constructing Adaptive Robust Fuzzy Neural Tracking Control of Surface Vehicles With Uncertainties and Unknown Disturbances
فایل های شبیه سازی با متلب به شرح زیر است:
- فایل Main.m که فایل اصلی بوده و با اجرای آن کلیه نتایج شبیه سازی بر روی نمودارهایی ترسیم میشوند.
- فایل سیمولینک SACFNC.mdl که سیستم کنترل حلقه بسته را پیاده سازی می کند.
- فایل SurfaceVehicleModel.m که مدل سیستم را پیاده سازی می کند.
- فایل SCARFNN.m که الگوریتم تخمین f مبتنی بر شبکه عصبی خودساز را پیاده سازی می کند.
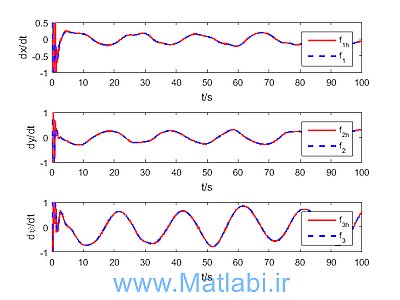
- فایل f_real.m مقدار دقیق توابع f را محاسبه می کند تا با مقادیر تخمینی مقایسه شوند.
- فایل AdaptiveApproximationBasedController.m رابطه 24 مقاله را پیاده سازی می کند.
- فایل RobustSuperVisoryController.m رابطه 25 مقاله را پیاده سازی می کند.
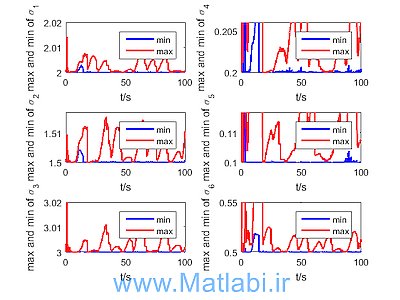
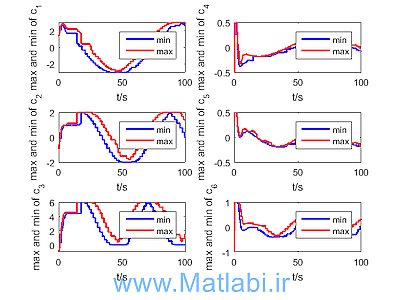
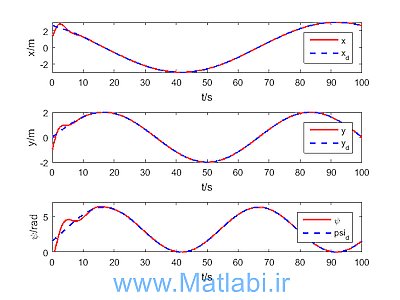
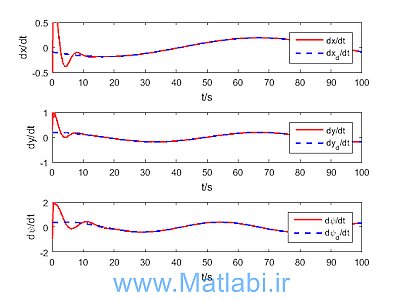
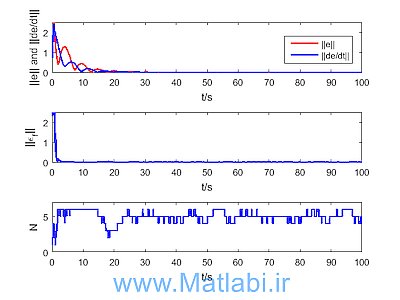
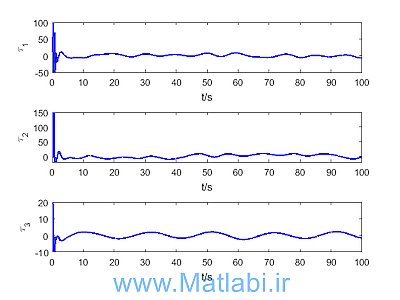
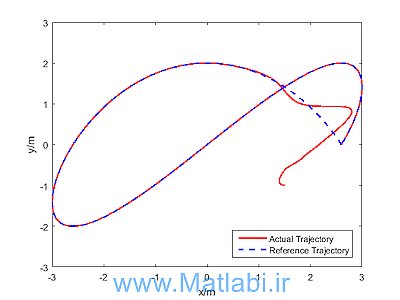
نتایج بدست آمده از شبیه سازی با متلب:

- انجام پروژه شبکه عصبی با متلبی
کلید واژه:پروژه متلب,شبیه سازی بامتلب
Adaptive robust tracking control, self-constructing fuzzy neural network (SCFNN), surface vehicle
شبیه سازی مقاله Self-Constructing Adaptive Robust Fuzzy Neural Tracking Control of Surface Vehicles With Uncertainties and Unknown Disturbances
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.