توضیحات
Second-order sliding mode fault-tolerant control of heat recovery steam generator boiler in combined cycle power plants
کلیات
- در این مقاله، کنترل تحملپذیر عیب مد لغزشی مرتبه دوم PID بر روی یک مدل خطیسازی شده بویلر صنعتی پیادهسازی شده است.
- کنترل، به صورت مدل مرجع است.
- کنترل در حضور عیب و نامعینی مدلسازی اجرا میگردد.
- در رابطه با کنترل تحملپذیر عیب، با تولید سیگنالهای مانده از مدل لغزشی، باند سیگنال عیب تخمین زده میشود و ضرایب کنترلی را تصحیح میکند. پس این یک نوع کنترل تطبیقی نیز هست.
- بسیاری از ضرایب در مقاله داده نشده یا اشتباه داده شده. به نویسندگان مقاله ایمیل داده شد و تعدادی از ضرایب رو فرستادند.
روش پیاده سازی
* ابتدا دایرکتوری MATLAB را روی یک پوشه که محتویات فایل ارسالی را داراست تنظیم نمایید.
توضیحاتی در محیط سیمولینک:
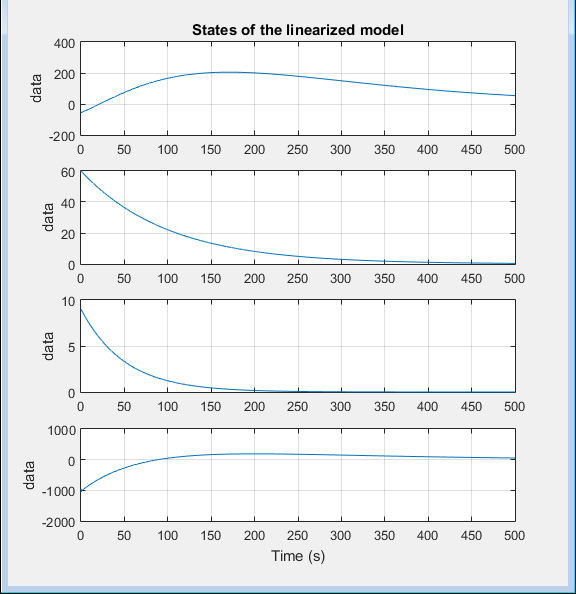
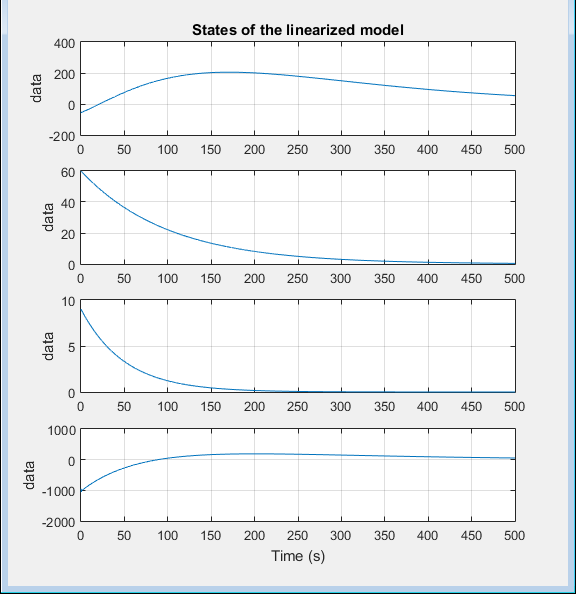
- ابتدا پلنت خطی سازی شده را (معادلات 17 و 18) ایجاد میکنیم. در محیط سیمولینک یک بلاک به نام Plant.
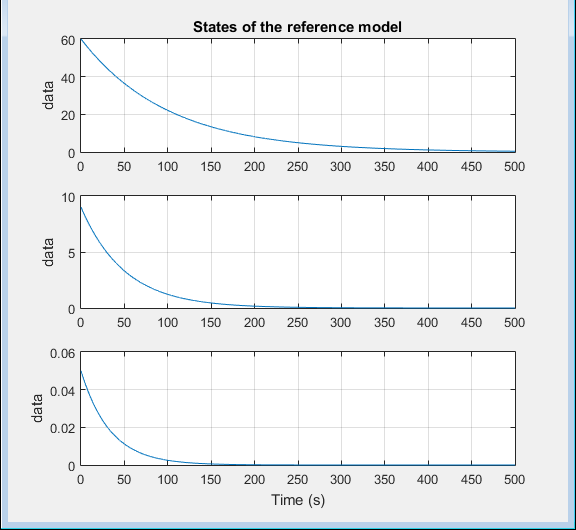
- سپس مدل مرجع را با استفاده از معادله 18 ایجاد مینماییم. در محیط سیمولینک یک بلاک به نام Reference Model.
- سیگنال کنترلی از رابطه 24 بدست میآید. که در آن v(t) از روابط 25، 26، 28، 29، 36 و 39 حاصل میشود. در سیمولینک یک بلاک به نام Controller. بخش تطبیقی نیز از معادلات 31، 32 و 33 بدست میآید.
- نامعینی در مدل (زیر شکل 4 صفحه 11 مقاله) به صورت ضرب ماتریس نامعینی در تابع پله (در لحظه 100 ثانیه) ایجاد میشود. در سیمولینک به صورت یک بلاک به نام Model Uncertainty.
- یک قسمت که مربوط به رسم نمودارهاست، به صورت یک بلاک به نام Plot در سیمولینک قرار دارد.
توضیحاتی در محیط کدنویسی
از ابتدا تا بخش Running simulation #1 مربوط به تعاریف ضرایب و ماتریسهای سیستم و کنترلر است. سپس در بخش Running simulation #1 شبیه سازی مربوط به شکلهای 4، 5، 6 و 7 مقاله است. شکلهای 4 تا 6 حدودا با مقاله یکسان است. ولی در شکل 7 مقاله، خطای خروجی دیرتر از شبیه سازی ما صفر میشود. این به دلیل عدم تعریف برخی ضرایب طراحی در مقاله است که ما از خودمون گذاشتیم و پاسخ سریعتر و بهتری گرفتیم.



در بخشهای بعد، یعنی Running simulation #2، Running simulation #3، Running simulation #4 بررسی عملکرد کنترلر در حضور عیب و نامیعنی بررسی میشود. شکلهای 8، 9 و 10 از مقاله مربوط به این قسمت هستند.
با اجرای بخشهای مذکور، نمودارهای شبیه سازی ما رسم میشوند. ولی در مقاله ورودیهای مرجع (um) تعریف نشده است.
در نتیجه ما یک ورودی مرجع از خودمون گذاشتیم (در پایین بلاک Model Reference) که در بررسی روش کنترلی اصلا مهم نیست.
در لحظات خاصی (پایین بلاک Plant در سیمولینک) عیب و نامعینی بر سیستم اثر میکند و با توجه به شکلهایی که رسم خواهد شد، به دلیل مقاوم بودن کنترلر، سریعا خطای تعقیب صفر شده و سیستم بویلر، مدل مرجع را تعقیب میکند.



کلید واژه:
Fault-tolerant control, Model reference control, Second-order sliding mode control, PID sliding surface, Heat recovery steam generator
شبیه سازی مقاله
Second-order sliding mode fault-tolerant control of heat recovery steam generator boiler in combined cycle power plants
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.