توضیحات
Robust MIMO disturbance observer analysis and design with application to active car steering (Robust control applied to a 4-wheel steering car)
ترجمه فارسی موضوع مقاله ها: طراحی و آنالیز مشاهده گر آشفته مقاوم MIMO با نرم افزار فعال فرمان خودرو (کنترل مقاوم اعمال شده به یک فرمان ماشین 4 چرخ)
توجه کنید این شبیه سازی مقاله های ذکر شده نیست و فقط به بحث طراحی یک کنترلر با H بی نهایت با استفاده از مقالات فوق است
پروژه کنترل مقاوم
پیاده سازی مقاله های زیر
Robust MIMO disturbance observer analysis and design with application to active car steering
و
با نرم افزار MATLAB
برنامه متلب به طور کامل کامنت گذاری شده است
- در خط 4 برنامه به تعریف s به عنوان یک تابع می پردازیم.
- سپس سیستم را به صورت داده شده در مقاله تعریف می کنیم.
- سپس وزن های مربوطه که همان فیلتر طراحی شده است را قرار میدهیم.
- سپس از تابع GUWA برای شکل دهی پلنت استفاده می کنیم.
- و در نهایت توسط تابع hinfsyn محاسبات را انجام می دهیم.
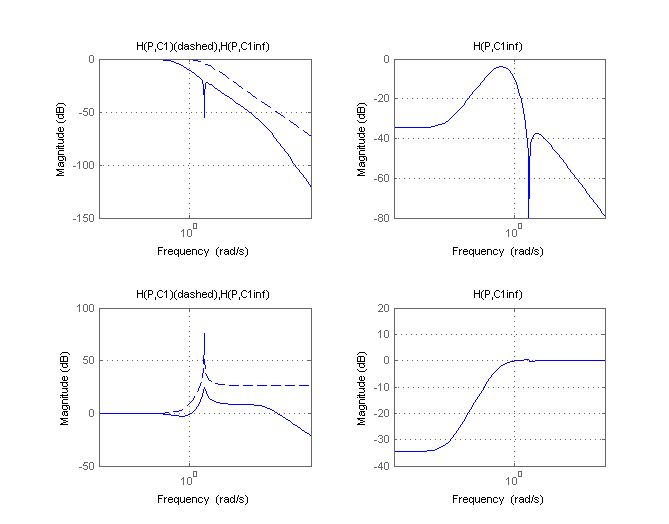
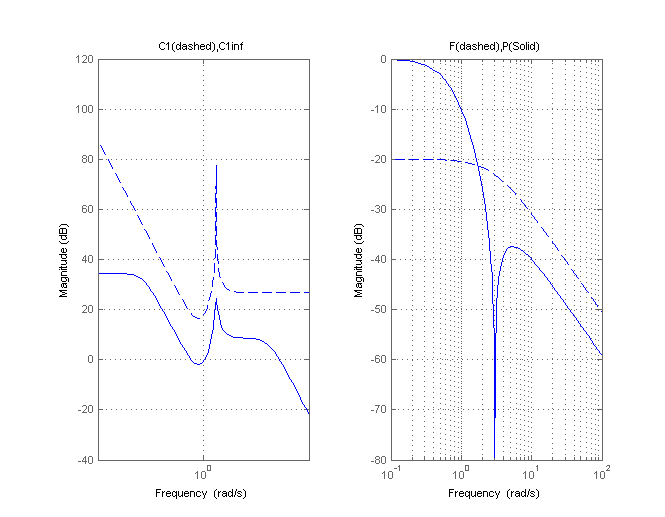
نتایج شبیه سازی با متلب :
با اجرای برنامه نمودار های بدست آمده در مقالات بدست می آید:
کلید واژه : کنترل مقاوم, چند متغیره, MIMO
disturbance observe , parameter space methods, car steering, real parametric uncertainty, structured singular, value analysis, robust performance, robust stability
شبیه سازی مقاله ها Robust MIMO disturbance observer analysis and design with application to active car steering (Robust control applied to a 4-wheel steering car)
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.