
توضیحات
Robust Kalman Filter Based Estimation of AUV Dynamics in the Presence Of Sensor Faults
تخمین فیلتر کالمن مقاوم از زیردریایی مستقل در حضور خطاهای حسگر
مقدمه
در سیستم های فیزیکی به دلایل مختلفی مقادیر حالت های سیستم های مدلسازی شده قابل اندازه گیری دقیق نمی باشند.
عدم دقت سنسورها، خطا در اندازه گیری، نداشتن سنسور مناسب و هزینه زیاد اندازه گیری دقیق و حتی کمی نبودن متغییر حالت و … همه دلایلی هستند که می توانند باعث نیاز ما به تخمین حالت های سیستم شود.
به همین دلیل تخمین گرهای مختلفی بدین منظور استفاده می شود که یکی از دقیق ترین و پرکاربردترین تخمین گرها Kalman Filter می باشد.
در این پروژه قصد داریم با اندازه گیری یکی از متغیرهای حالت در یک زیردریایی، به تخمین سایر حالت ها بپردازیم. به دلیل نویز شدید و از طرفی عدم کالیبره بودن سنسور حالت خاصی پیش می آید که ما نیاز به طراحی یک تخمین گر مقاوم خواهیم داشت.
معادلات سیستم
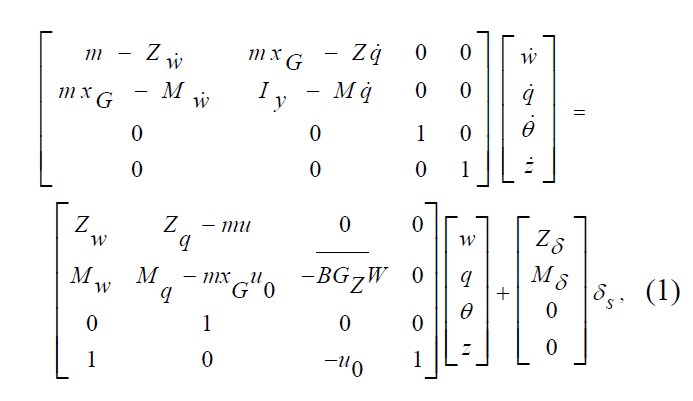
معادلات یک زیردریایی REMUS طبق مقاله مورد نظر قابل جداسازی به دو دسته معادلات مستقل از هم می باشد. معادلات Diving Subsystem به صورت زیر می باشد:
و برای حالت Steering Subsystem نیز به صورت زیر می باشد:
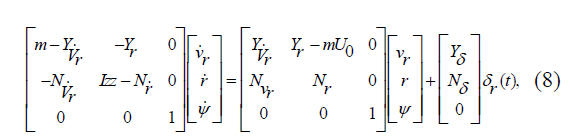
برای استفاده از کالمن فیلتر ابتدا نیاز است که معادلات فوق را گسسته کنیم. به همین دلیل با استفاده از روابط گفته شده در مقاله (روابط 6، 7 و 13) این کار به راحتی قابل انجام می باشد.
کالمن فیلتر
کالمن فیلتر یک تخمین گر حالت می باشد که برای سیستم های بیان شده در مدل فضای حالت به کار می رود. در این تخمین گر ما نیاز به دانستن، ماتریس های حالت و واریانس نویزهای ورودی و اندازه گیری هستیم.
روابط فیلتر کالمن در گزارشکار آمده است.
که پیاده سازی متلب این کدها در فایل های KF ضمیمه شده است.
اما همانطور که گفته شد، در صورتی که خطای اندازه گیری زیاد باشد، این امر می تواند باعث ناپایداری تخمین گر شود، از همین رو در این مقاله به طراحی یک تخمین گر مقاوم پرداخته شده است که نحوه عملکرد آن به صورت زیر می باشد.
لازم به ذکر است که این تخمین گر با توجه به میزان خطا یک ضریب را به نحوی اصلاح می نماید که در تخمین گر کالمن فیلتر ناپایدار نشود.
روابط تخمین گر مقاوم در گزارش کار آمده است.
لازم به ذکر است، از آنجایی که داده های مقاله از جمله بیان مقدار پارامترها، مقدار ورودی، داده های اندازه گیری شده واقعی و سیگنال ورودی … در دسترس نبودند، و این شبیه سازی بر اساس پارامترهای گرفته شده از مقالات ضمیمه شده طراحی شده است و اختلاف بین شکل های موجود در مقاله و مقادیر شبیه سازی شد ناگزیر می باشد.
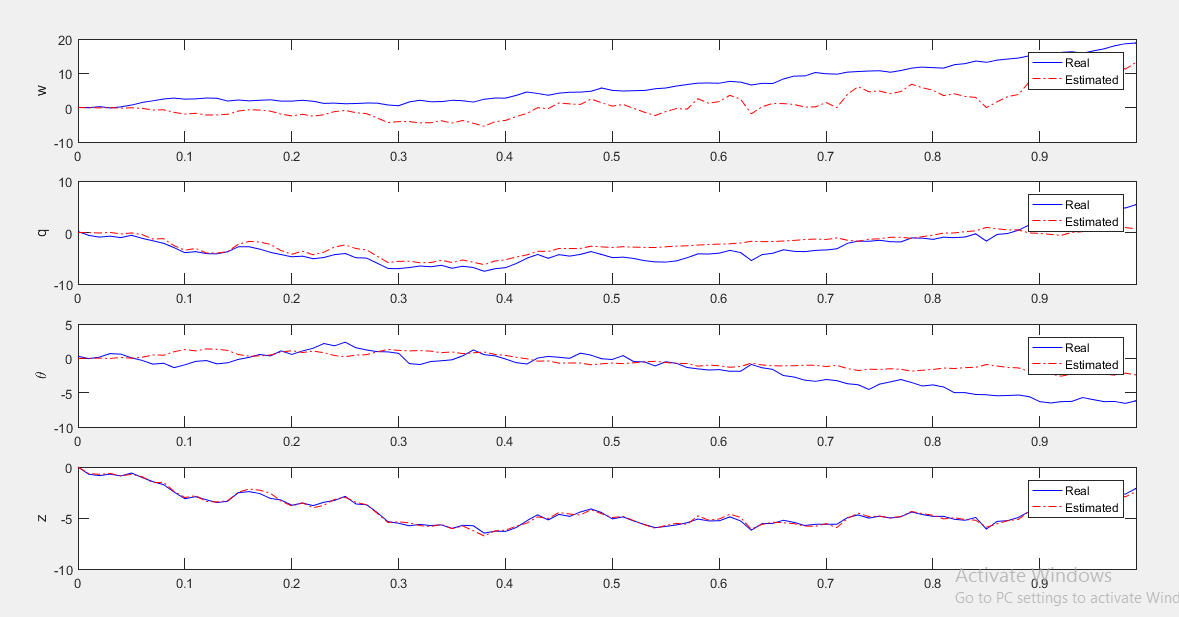
تخمین گر غیر مقاوم
و
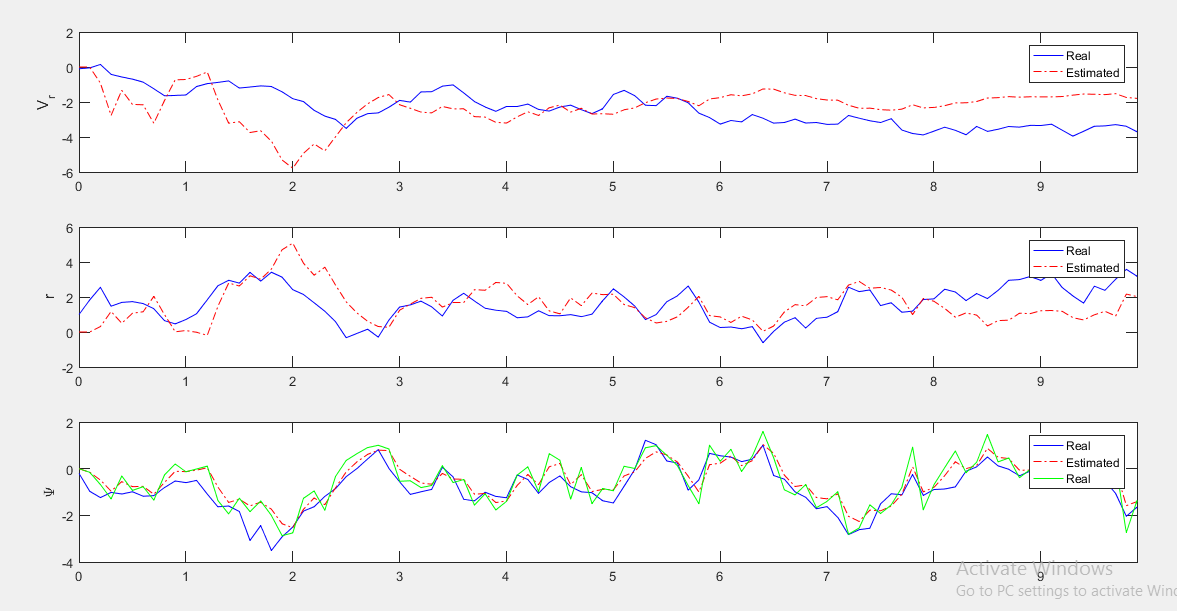
تخمین گر مقاوم
 و
و
کلیدواژه:
Robust Kalman Filter, AUV Dynamics, Sensor Faults, RKF , KF
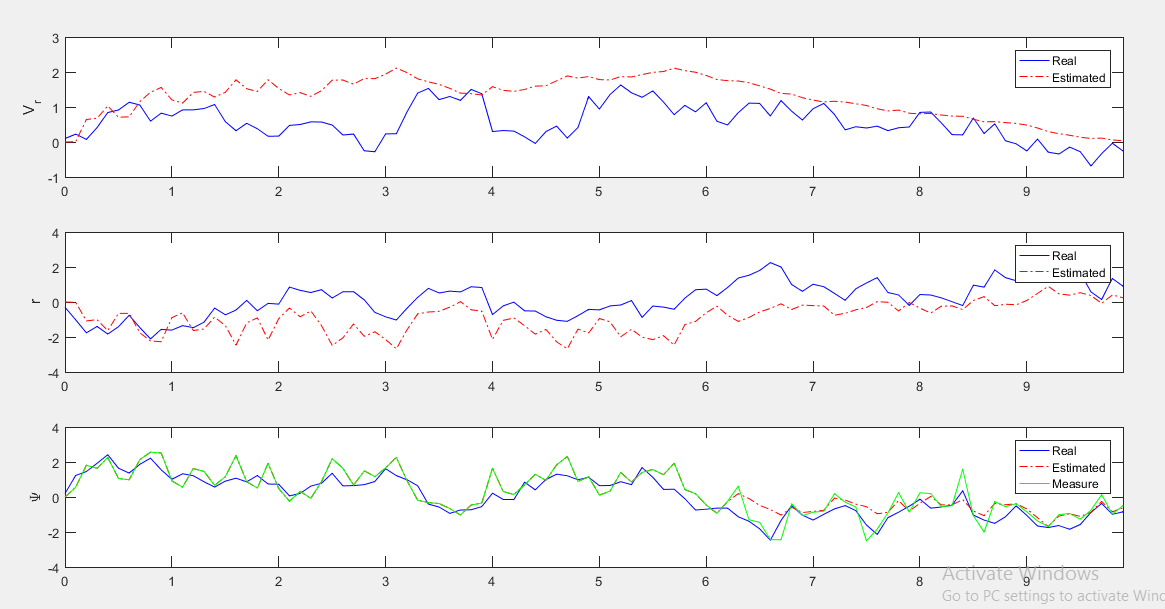
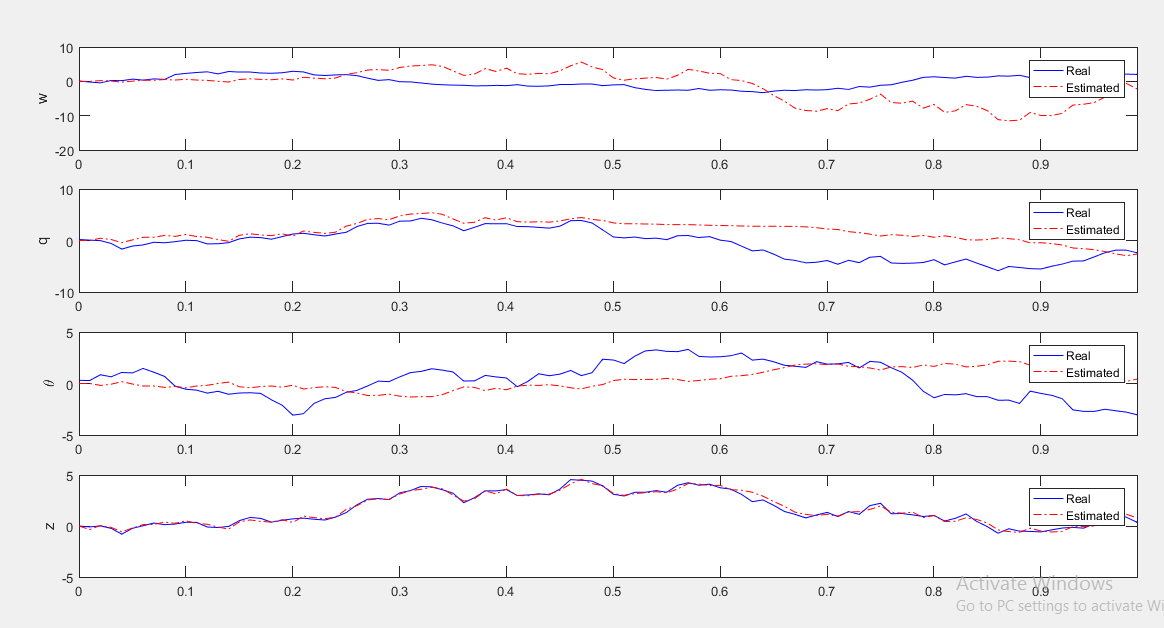
شبیه سازی
Robust Kalman Filter Based Estimation of AUV Dynamics in the Presence Of Sensor Faults
توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.