توضیحات
کنترل پسگام انتگرال مقاوم برای مدل یکپارچه وسایل نقلیه الکتریکی هیبریدی
عنوان اصلی مقاله:
Robust Integral Backstepping Control for Unified Model of Hybrid Electric Vehicles
شبیه سازی قسمت اول مقاله, کنترل کننده های گام به عقب انتگرالی و مد لغزشی انجام شده است.
شبیه سازی در محیط ام فایل و سیمولینک متلب 2020 انجام شده است.
دارای گزارش ورد 6 صفحه ای می باشد.
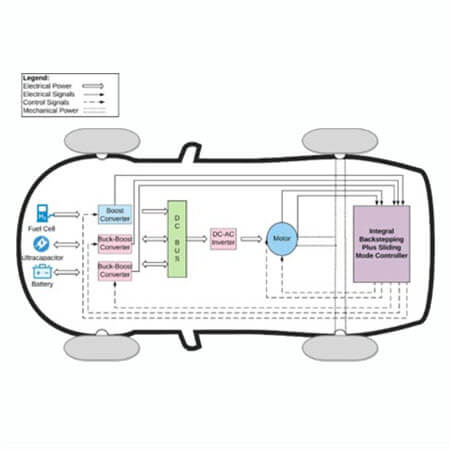
خلاصه: در این مقاله، یک کنترلکننده غیرخطی برای مدل یکپارچه خودروهای الکتریکی هیبریدی (HEV) که شامل سلول سوختی (FC)، الکترولیت (SC) و باتری (BAT) است، طراحی شده است. این کنترلکننده با استفاده از روش بازگشت به عقب با انتگرال (IB)، سعی میکند تاثیرات عدم قطعیت پارامترها و خطی نبودن مدل را کاهش دهد. برای این منظور، یک مدل ریاضی دقیق و یکپارچه برای HEV ارائه شده است که شامل دینامیک FC، SC و BAT است. سپس، یک کنترلکننده IB برای تنظیم ولتاژ FC و جریان BAT طراحی شده است. این کنترلکننده میتواند به طور همزمان از FC و BAT محافظت کند و بازدهی انرژی را بهبود بخشد. نتایج شبیهسازی نشان میدهد که کنترلکننده IB میتواند عملکرد مطلوبی را در حضور عدم قطعیت پارامترها و اختلالات خارجی ارائه دهد.
توضیحات پروژه کنترل پسگام انتگرال مقاوم
در این پروژه, فقط بخش اول مقاله که مربوط به شبیه سازی قسمت اول کنترل کننده ها گام به عقب انتگرالی و مد لغزشی میشود انجام شده است.
این مقاله در مورد طراحی یک کنترلکننده غیرخطی برای مدل یکپارچه خودروهای الکتریکی هیبریدی است که از سلول سوختی، الکترولیت و باتری تشکیل شدهاند. این کنترلکننده با استفاده از روش بازگشت به عقب (بک استپینگ یا همان پسگام) با انتگرال (integral backstepping) سعی میکند تاثیرات عدم قطعیت پارامترها و خطی نبودن مدل را کاهش دهد.
نکته: دقت نمایید که پروژه با کدنویسی متلب انجام شده است. فقط از آن جا که نیاز است از برخی بلوک ها نظیر مشتق گیر استفاده شود، کدهای متلب (نوشته شده در بلوکهای MATLAB function) به محیط سیمولینک انتقال یافته است.
نکته: ممکن است برخی ضرایب کنترلی موجود در شبیه سازی تغییرات کمی نسبت به مقاله داشته باشند که این کار برای تطبیق بهتر نمودارهای خروجی و نمودارهای مقاله است و در سیستم مورد نظر مقاله تغییری ایجاد نشده است.
نکته: در قسمت هایی که ثابت های مساله طبق مقاله نوشته شده اند، مشخص شده است که از کدام جدول گرفته شده اند.
در بخش سیمولینک, قسمت اول که کنترلکننده گام به عقب و مود لغزشی است، شبیه سازی شده است. در گزارش شبیه سازی بخش های مختلف سیمولینک شماره گذاری و در گزارش به آن پرداخته شده است. مثلا بخش اول آن سیگنال مرجع Load Current Profile طبق شکل 7 مقاله ساخته شده است. که شکل سیگنال به صورت زیر است:

Load current profile
در بخش دیگری از سیمولینک, در بلوک MATLAB function معادلات 86، 87، 96 و 114 نوشته شده اند که به تولید متغیرهای x5d و x6d می پردازد. در خطوط 20 تا 23 به تعدادی متغیر که در مقاله مقداردهی نشده اند، مقدار صفر اختصاص داده شده است. نام گذاری این متغیرها به گونه ای است که به راحتی با مقاله قابل تطبیق است.
در بخش دیگری از سیمولینک, دو بلوک PID ملاحظه می گردد. این بلوک ها دارای ضرایب Kp = 0 و Ki = 0 و Kd = 1 هستند. با این ضرایب، بلوک PID نقش یک مشتق گیر را خواهد داشت. بلوک PID به دلیل نویز کمتری که ایجاد میکند، گزینه بهتری نسبت به بلوک مشتق گیر موجود در سیمولینک است.
توضیحات بیشتر با خرید این محصول قابل دریافت است.
نتایج شبیه سازی با متلب
شبیه سازی با ام فایل main.m قابل اجراست.
نتایج شبیه سازی به صورت زیر است:

fig7: Load current profile
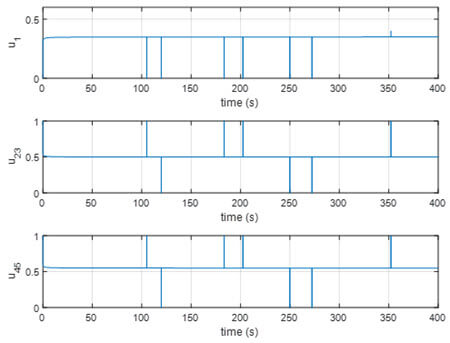
FIGURE 6. Converter control laws (a) u1 (b) u23 (c) u45.

FIGURE 8. Energy sources’ currents (a) Fuel Cell (b) Ultracapacitor
(c) Battery
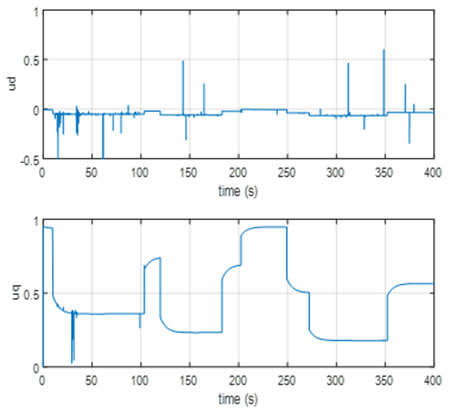
FIGURE 10. Motor control laws (a) ud (b) uq
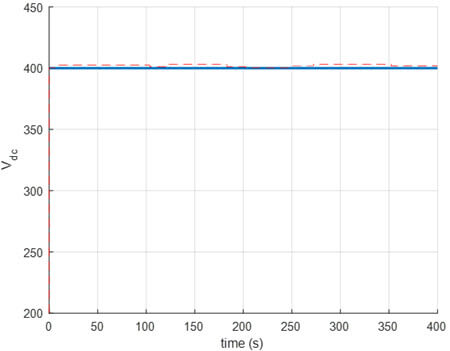
FIGURE 11. DC-DC bus voltage tracking (Vdc).
ملاحظه می شود که همچون مقاله، در این جا هم ولتاژ Vdc سریع به مقدار مرجع 400 ولت رسیده است (سایر شکل ها برای قسمت دوم مقاله بودند و رسم نشدند)
شاید به موارد زیر علاقه مند باشید:
- بررسی آثار شارژ و دشارژ خودروهای هیبریدی بر شبکه نمونه
- الگوریتم ژنتیک موازی در بهینه سازی راه های فواصل بین وسایل نقلیه
- بهینه سازی هیبریدی برای پارامترهای تولید پراکنده در یک شبکه سیستم قدرت
- کنترل تحمل پذیر خطا/خسارت یک وسیله نقلیه هوایی بدون سرنشین هلیکوپتر کوادروتور با استفاده از کنترل تطبیقی مدل مرجع و PID زمانبندی شده
- سیستم ساختمان یکپارچه فتوولتائیک متصل به شبکه سه فاز با قابلیت کنترل توان راکتیو
کلیدواژه:
Hybrid electric vehicles, unified model, non-linear control, integral backstepping control, backstepping control, stabilizing functions
خودروهای الکتریکی هیبریدی, مدل یکپارچه, کنترل غیر خطی, کنترل پسگام یکپارچه, کنترل پسگام, عملکردهای تثبیت کننده
کنترل پسگام انتگرال مقاوم برای مدل یکپارچه وسایل نقلیه الکتریکی هیبریدی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.