
توضیحات
Robust: H inifinity
ترجمه فارسی موضوع مقاله: طراحی یک کنترلر با H بی نهایت
پروژه کنترل مقاوم
Robust Control
شرح کار:
این مقاله به بررسی روشی می پردازد که در آن نحوه طراحی یک کنترلر با ∞H را در متلب مشخص می کند.
در این مثال سعی شده است راه های مختلفی برای این منظور طراحی شوند. مدل به کار رفته برگرفته از (Skogestad and Postlethwaite, 1996 ed.1 p.60) می باشد.
مدل به کار رفته در این مثال
Plant G=200/((10s+1)(0.05s+1)^2)
می باشد.
مراحل کار بدین صورت است:
- ابتدا به کمک تولباکس متلب G را طراحی می کنیم. خط 14
- سپس وزن ها را با توجه به اطلاعات مقاله تعیین میکنیم 22-20
- در خطوط 28-30 ماتریس های انتقال را شبیه سازی میکنی
- سپس در خطوط 32-36 با توجه به این ماتریس های انتقال Plant کلی را طراحی می کنیم
- در 43-46 فضای حالت این Plant را ایجاد می کنیم
- در خطوط 47-50 ورودی ها و خروجی ها را مشخص می کنیم
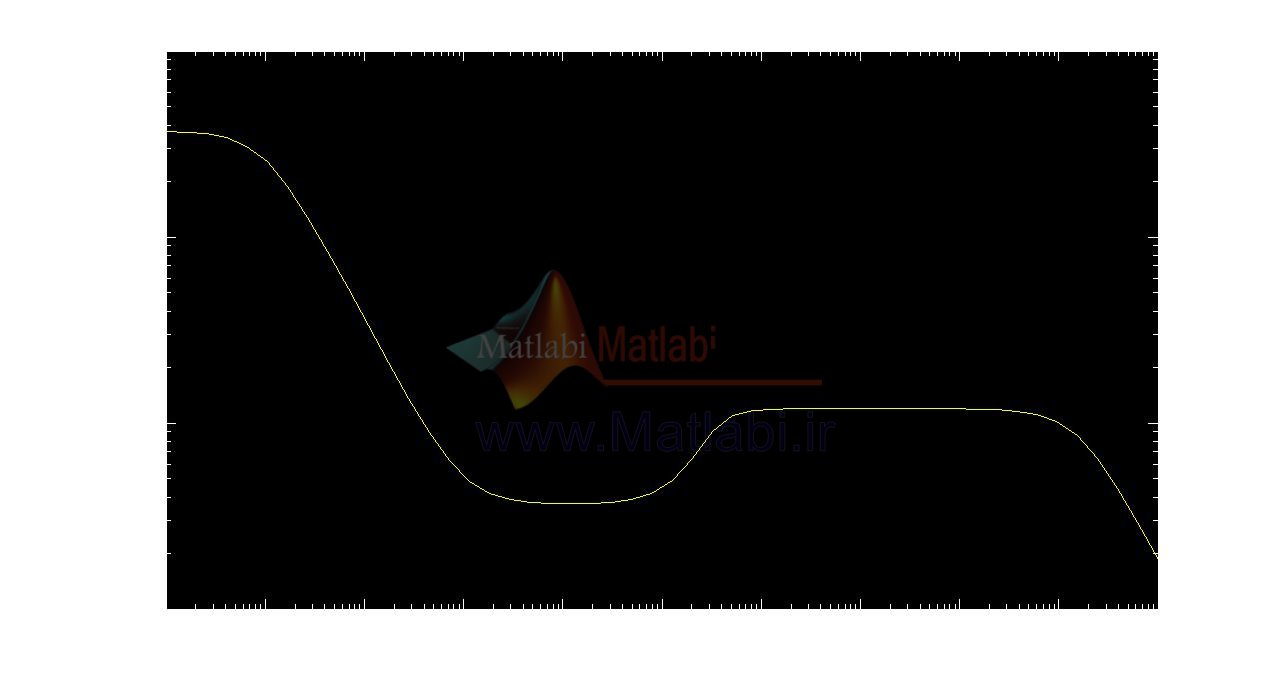
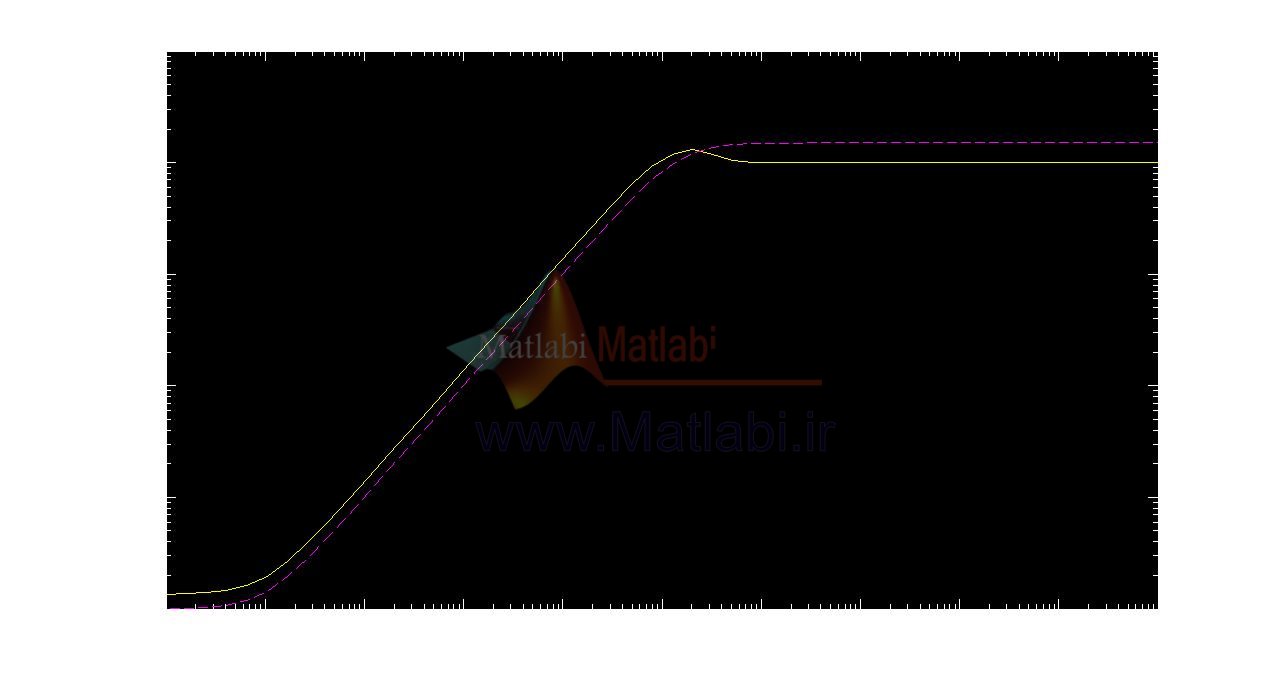
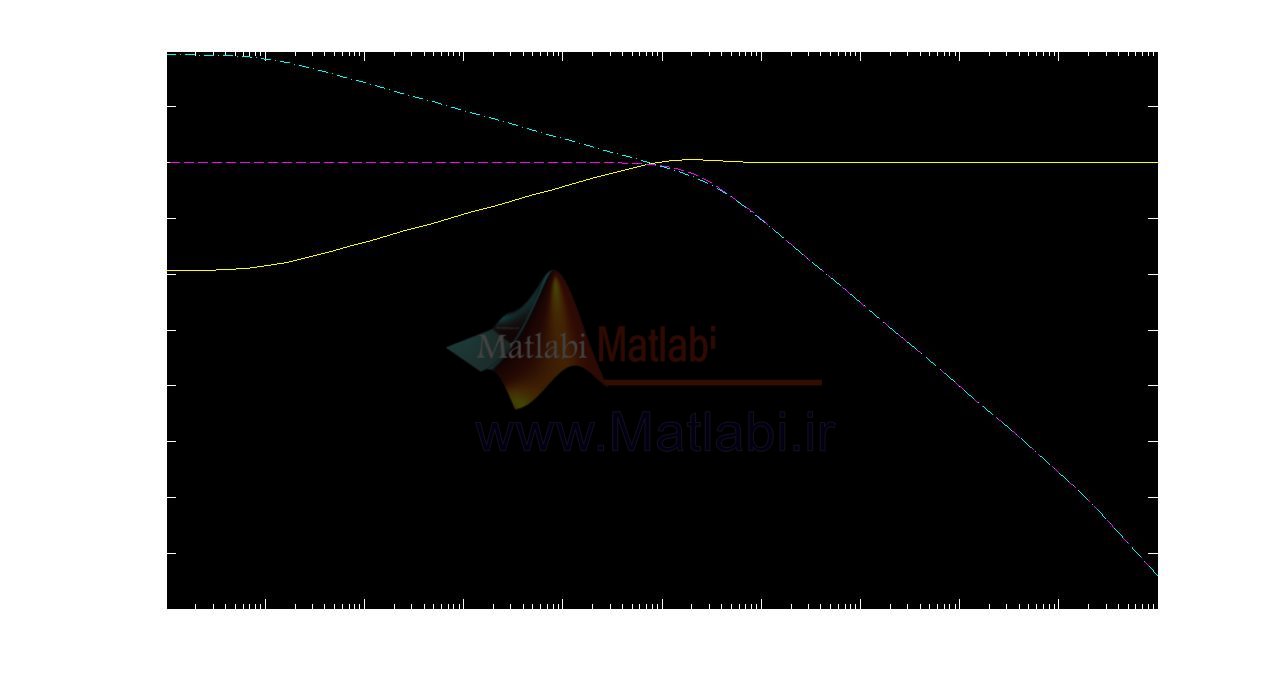
- و در خطوط 112-117 کنترل روبوست را طراحی کرده و در نهایت نتایج شبیه سازی را رسم میکنیم.
نتایج شبیه سازی در زیر آمده است:




4 states removed.
Minimization of gamma:
Solver for linear objective minimization under LMI constraints
Iterations : Best objective value so far
1
2
3
4
5
6 697.119489
7 505.936905
8 343.636293
9 134.550427
10 134.550427
11 53.900832
12 28.102641
13 28.102641
14 9.408791
15 3.253812
16 3.253812
17 2.196039
18 2.196039
19 1.556245
20 1.556245
21 1.505633
22 1.505633
23 1.487717
24 1.487717
25 1.420399
26 1.415296
*** new lower bound: 1.247690
27 1.392159
*** new lower bound: 1.356808
28 1.370434
29 1.370033
*** new lower bound: 1.364234
30 1.368869
* switching to QR
31 1.368159
*** new lower bound: 1.366859
Result: feasible solution of required accuracy
best objective value: 1.368159
guaranteed relative accuracy: 9.50e-004
f-radius saturation: 1.341% of R = 1.00e+008
Optimal Hinf performance: 1.366e+000
interpolating input vector (zero order hold)
interpolating input vector (zero order hold)
4 states removed.
Minimization of gamma:
Solver for linear objective minimization under LMI constraints
Iterations : Best objective value so far
1
2
3
4
5
6 697.119489
7 505.936905
8 343.636293
9 134.550427
10 134.550427
11 53.900832
12 28.102641
13 28.102641
14 9.408791
15 3.253812
16 3.253812
17 2.196039
18 2.196039
19 1.556245
20 1.556245
21 1.505633
22 1.505633
23 1.487717
24 1.487717
25 1.420399
26 1.415296
*** new lower bound: 1.247690
27 1.392159
*** new lower bound: 1.356808
28 1.370434
29 1.370033
*** new lower bound: 1.364234
30 1.368869
* switching to QR
31 1.368159
*** new lower bound: 1.366859
Result: feasible solution of required accuracy
best objective value: 1.368159
guaranteed relative accuracy: 9.50e-004
f-radius saturation: 1.341% of R = 1.00e+008
Optimal Hinf performance: 1.366e+000
interpolating input vector (zero order hold)
interpolating input vector (zero order hold)
کلید واژه : کنترل مقاوم
Robust, closed loop
شبیه سازی مقاله
Robust: H inifinity (طراحی کنترلر مقاوم با H بی نهایت)
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.