توضیحات
Robust Feedback Linearization Control for Reference Tracking and Disturbance Rejection in Nonlinear Systems
مقاله یک سیستم CSTR روش کنترلی را ارائه و پیاده سازی نموده,اما در این پروژه روش مقاله را برای سیستم quadrotor طراحی شده و برای quadrotor خطی شده به وسیله روش خطی سازی فیدبک یک کنترل کننده H_inf طراحی شده و عملکرد اون رو ارزیابی کرده.
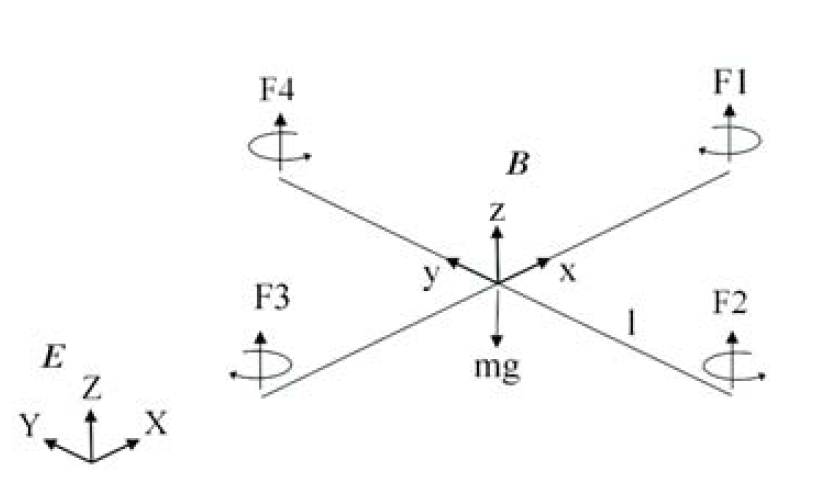
معادله دینامیک حاکم بر یک ربات کوادروتور را می توان به صورت زیر نمایش داد:
با در نظر گرفتن، ، معادله دینامیک ربات به صورت قابل دست یابی می باشد که از آن به منظور طراحی کنترلر استفاده می شود:
با توجه به روش Feedback linearization، سیستم را به چهار زیر سیستم، زیر تقسیم می کنیم که دینامیک سیستم در راستاهای رول، پیچ و یاو و z می باشند و برای هر کدام یک کنترلر طراحی می کنیم:
- زیر سیستم حرکت rolling
- زیر سیستم حرکت pitch
- زیر سیستم حرکت yaw
- زیر سیستم حرکت در راستای Z
شبیه سازی در سیمولینک و ارائه نتایج:
….
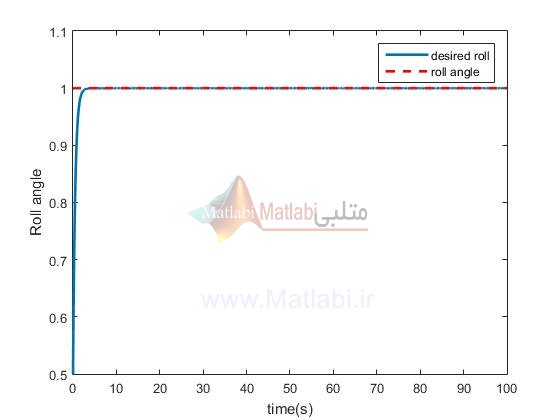
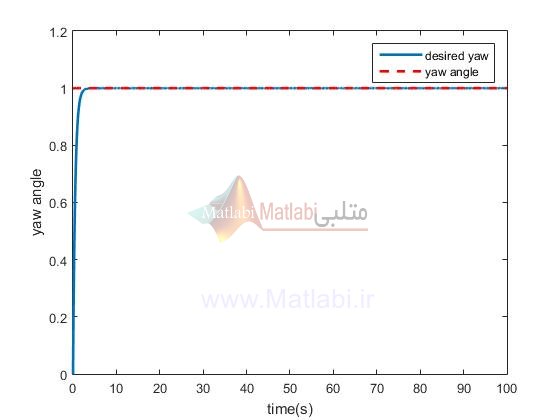
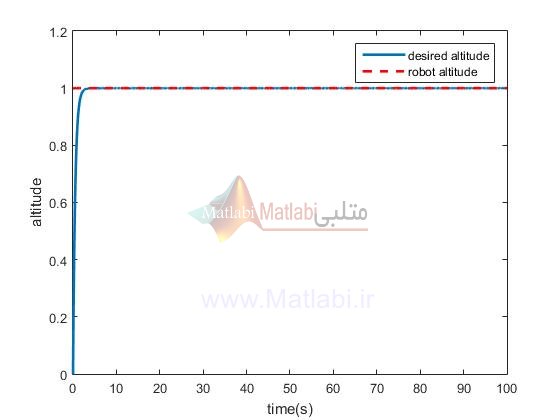
به منظور بررسی عملکرد کنترلر طراحی شده، سیستم ابتدا، برای زوایای رول، پیچ، یاو و ارتفاع، برای دو حالت step و سینوسی مورد بررسی قرار گرفت:
برای ورودی Step:

برای ورودی Sin:
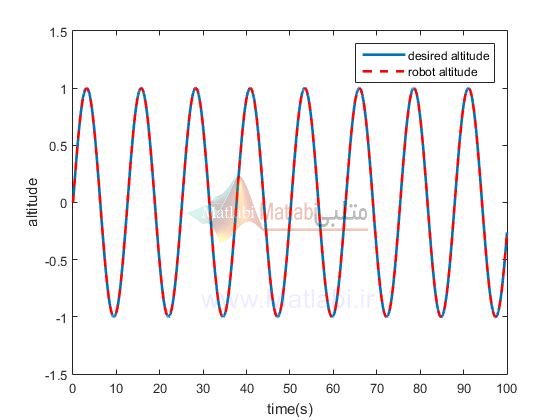
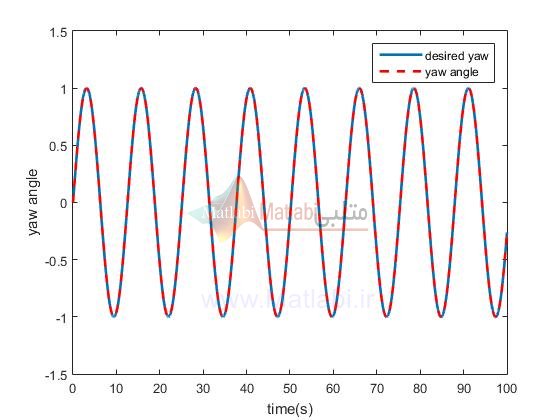
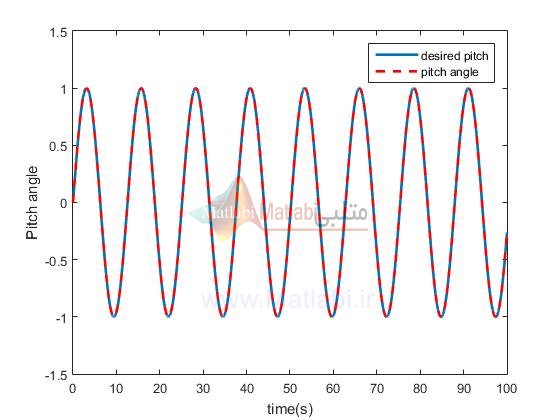
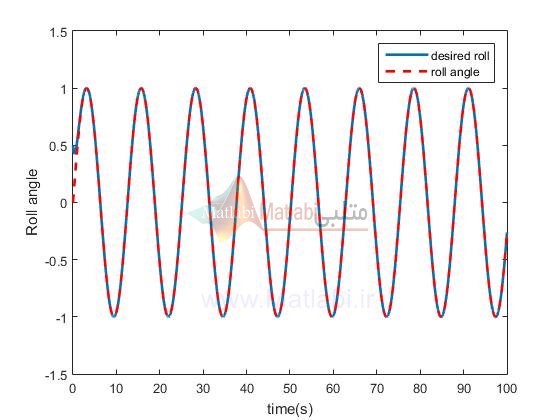
با توجه به تست سیستم در دو حالت فوق، عملکرد خوب سیستم کنترلی مشهود است.
کلید واژه : کنترل کننده مقاوم
شبیه سازی با متلب ,پروژه های اماده متلب, matlab,matlab project,پروژه متلب,
شبیه سازی مقاله
Robust Feedback Linearization Control for Reference Tracking and Disturbance Rejection in Nonlinear Systems
توسط کارشناسان متلبی تهیه شده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





