
توضیحات
Retrospective Cost Model Reference Adaptive Control for Non minimum-Phase Discrete-Time Systems, The Adaptive Controller
شبیه سازی با متلب 32بیتی 2010a انجام شده است.
سیستم اصلی را به فرم زیر انتخاب میکنیم. این سیستم دارای یک صفر ناپایدار بوده و غیرمینیمم فاز است.
![]()
مدل مرجع را به فرم زیر انتخاب میکنیم.
![]()
بردار رگرسورها را طبق رابطه (8) تشکیل داده و سیگنال کنترلی را طبق رابطه (7) به دست میآوریم.
رابطه تطبیق پارامترها را طبق معادلات (17) و (18) به دست میآوریم.
…
نمودار زیر مقایسه خروجی سیستم اصلی و مدل مرجع به ورودی سینوسی است. 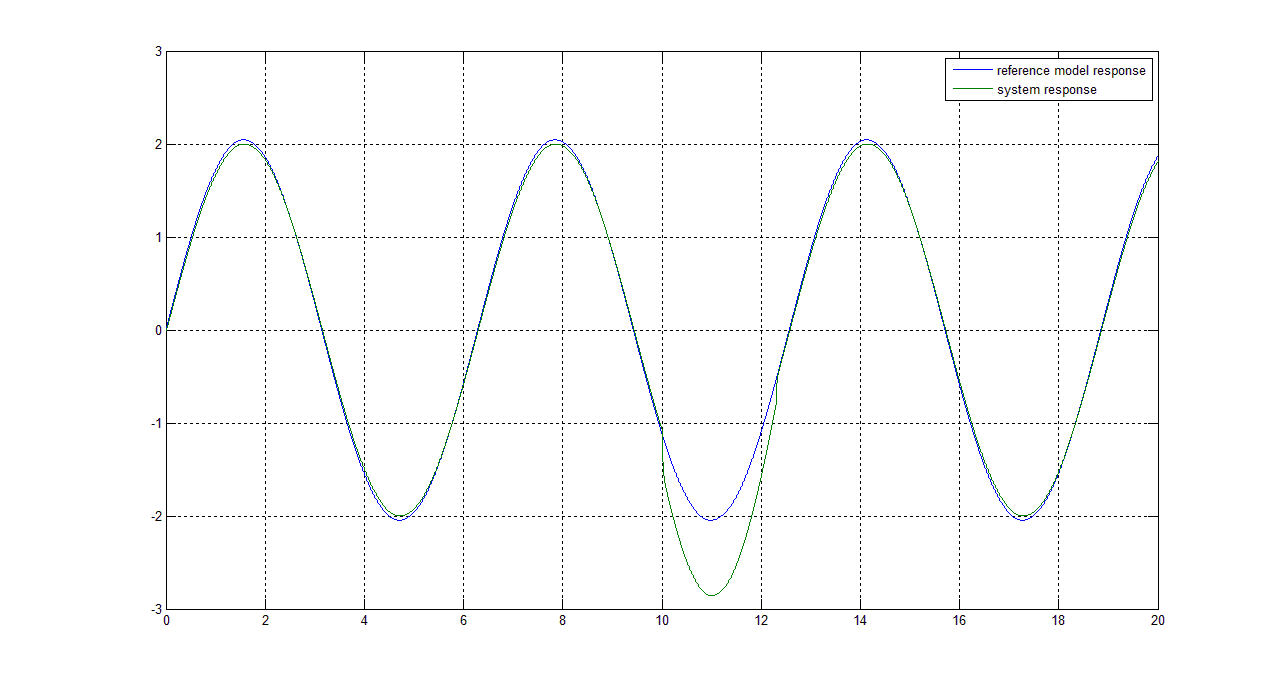
همانطور که ملاحظه میشود، پارامترهای مدل در لحظه t=10sیک تغییر ناگهانی را متحمل شدهاند اما کنترل تطبیقی به خوبی توانسته است با شناسایی مجدد پارامترها خود را با شرایط جدید وفق داده و پس از گذشت زمان کوتاهی ردیابی مدل مرجع را مجدداً به خوبی انجام دهد.
کلید واژه : کنترل تطبیقی, پروژه متلب, پروژه matlab , شبیه سازی با متلب
Adaptive, closed-loop stability
شبیه سازی
Retrospective Cost Model Reference Adaptive Control for Non minimum-Phase Discrete-Time Systems, The Adaptive Controller
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





