توضیحات
Real-time Implementation and Performance Analysis of Two Dimension PID Fuzzy Controller for Continuous Stirred Tank Reactor
مقایسه یک کنترل کننده PID با یک کنترل کننده fuzzy-PID
در این مقاله هدف مقایسه یک کنترل کننده PID با یک کنترل کننده fuzzy-PID می باشد.
توضیحات کامل مربوط به این دو کنترلر و قوانین فازی در مقاله داده شده است ولی در این مقاله هیچ اطلاعاتی راجع به مقادیر بهره های کنترل کننده PID، توابع عضویت مورد استفاده برای ورودی و خروجی های کنترلر فازی، رنج داده های ورودی به کنترلر فازی و setting time، overshoot و … جهت تنظیم دقیق دو کنترل کننده پیشنهادی داده نشده است و بنابراین همه این مقادیر به دلخواه تنظیم و قرار داده شده است:
- مدل شناسایی شده سیستم:
![]()
شبیه سازی سیستم مدار باز در محیط سیمولینک
سیستم فوق در محیط سیمولینک به شکل زیر ایجاد شده است (open_loop.slx)
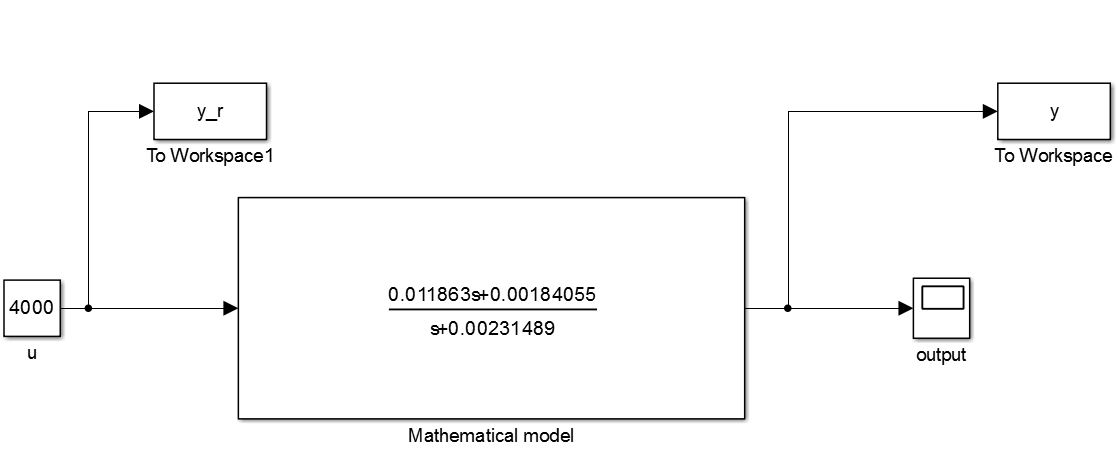
پاسخ مدار باز سیستم با ورودی 400 در زیر نشان داده شده است :

پاسخ open loop
طراحی کنترل کننده PID
یک کنترل کننده PID جهت تعقیب setpoint بر روی سیستم اعمال شد (PID.slx)، نمایی از سیستم در حضور کنترل کننده PID در شکل زیر نشان داده شده است:
…
پس از اجرا، عملکرد خوب کنترل کننده در تعقیب setpoint در زیر نشان داده شده است:

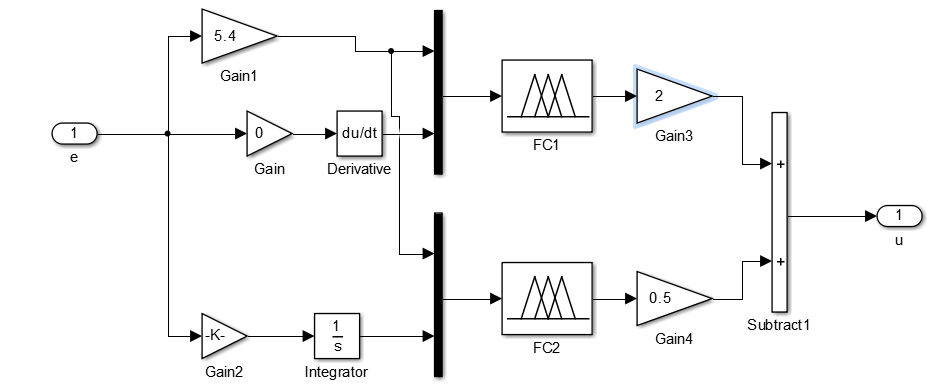
به منظور بهتر نمودن عملکرد کنترلر PID یک کنترلر PID مبتنی بر فازی در مقاله ارائه شده است که نمایی از آن را در شکل زیر مشاهده می نمایید:
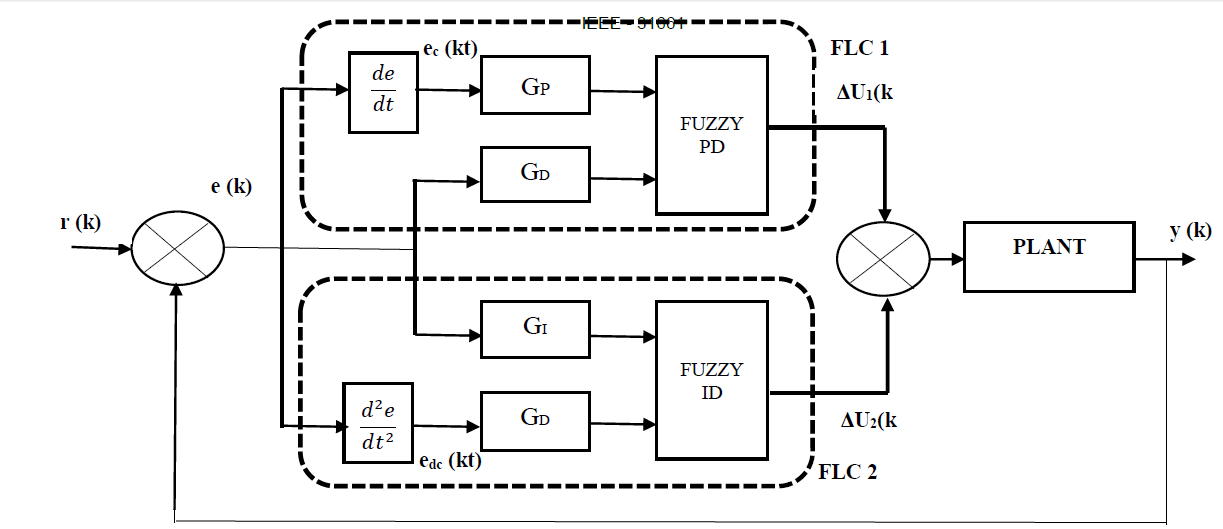
کنترل PID مبتنی بر فازی پیشنهادی
جدول قوانین فازی برای FLC1 و FLC2:
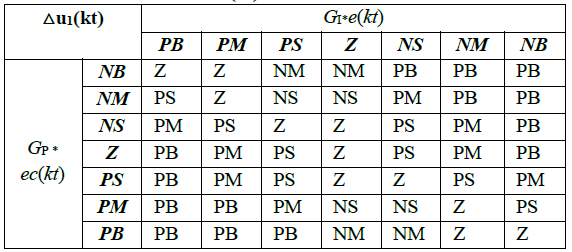

در ادامه به ایجاد دو کنترلر فازی براساس قوانین فوق و با 7 عدد تابع عضویت برای هر ورودی پرداخته می شود:
با اجرای کد زیر و با تغییر نام فایل مربوط به سیستم فازی طراحی شده می توانید محتویات سیستم فازی طراحی شده را مشاهده نمایید:
…
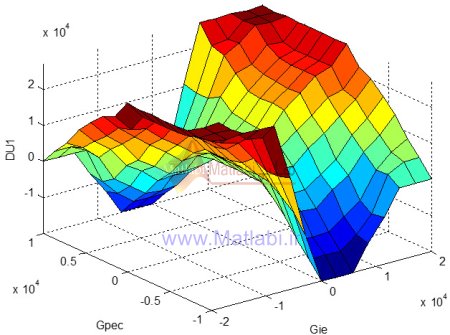
پس از اجرا برای سیستم فازی طراحی شده (FC1)، خروجی این سیستم شامل موارد زیر نشان داده می شود:
قوانین فازی مربوطه
|
1. If (Gie is PB) and (Gpec is NB) then (DU1 is Z) (1) 2. If (Gie is PM) and (Gpec is NB) then (DU1 is Z) (1) 3. If (Gie is PS) and (Gpec is NB) then (DU1 is NM) (1) 4. If (Gie is Z) and (Gpec is NB) then (DU1 is NM) (1) 5. If (Gie is NS) and (Gpec is NB) then (DU1 is PB) (1) 6. If (Gie is NM) and (Gpec is NB) then (DU1 is PB) (1) 7. If (Gie is NB) and (Gpec is NB) then (DU1 is PB) (1) 8. If (Gie is PB) and (Gpec is NM) then (DU1 is PS) (1) 9. If (Gie is PM) and (Gpec is NM) then (DU1 is Z) (1) 10. If (Gie is PS) and (Gpec is NM) then (DU1 is NS) (1) 11. If (Gie is Z) and (Gpec is NM) then (DU1 is NS) (1) 12. If (Gie is NS) and (Gpec is NM) then (DU1 is PM) (1) 13. If (Gie is NM) and (Gpec is NM) then (DU1 is PB) (1) 14. If (Gie is NB) and (Gpec is NM) then (DU1 is PB) (1) 15. If (Gie is PB) and (Gpec is NS) then (DU1 is PM) (1) 16. If (Gie is PM) and (Gpec is NS) then (DU1 is PS) (1) 17. If (Gie is PS) and (Gpec is NS) then (DU1 is Z) (1) 18. If (Gie is Z) and (Gpec is NS) then (DU1 is Z) (1) 19. If (Gie is NS) and (Gpec is NS) then (DU1 is PS) (1) 20. If (Gie is NM) and (Gpec is NS) then (DU1 is PM) (1) 21. If (Gie is NB) and (Gpec is NS) then (DU1 is PB) (1) 22. If (Gie is PB) and (Gpec is Z) then (DU1 is PB) (1) 23. If (Gie is PM) and (Gpec is Z) then (DU1 is PM) (1) 24. If (Gie is PS) and (Gpec is Z) then (DU1 is PS) (1) 25. If (Gie is Z) and (Gpec is Z) then (DU1 is Z) (1) 26. If (Gie is NS) and (Gpec is Z) then (DU1 is PS) (1) 27. If (Gie is NM) and (Gpec is Z) then (DU1 is PM) (1) 28. If (Gie is NB) and (Gpec is Z) then (DU1 is PB) (1) 29. If (Gie is PB) and (Gpec is PS) then (DU1 is PB) (1) 30. If (Gie is PM) and (Gpec is PS) then (DU1 is PM) (1) 31. If (Gie is PS) and (Gpec is PS) then (DU1 is PS) (1) 32. If (Gie is Z) and (Gpec is PS) then (DU1 is Z) (1) 33. If (Gie is NS) and (Gpec is PS) then (DU1 is Z) (1) 34. If (Gie is NM) and (Gpec is PS) then (DU1 is PS) (1) 35. If (Gie is NB) and (Gpec is PS) then (DU1 is PM) (1) 36. If (Gie is PB) and (Gpec is PM) then (DU1 is PB) (1) 37. If (Gie is PM) and (Gpec is PM) then (DU1 is PB) (1) 38. If (Gie is PS) and (Gpec is PM) then (DU1 is PM) (1) 39. If (Gie is Z) and (Gpec is PM) then (DU1 is NS) (1) 40. If (Gie is NS) and (Gpec is PM) then (DU1 is NS) (1) 41. If (Gie is NM) and (Gpec is PM) then (DU1 is Z) (1) 42. If (Gie is NB) and (Gpec is PM) then (DU1 is PS) (1) 43. If (Gie is PB) and (Gpec is PB) then (DU1 is PB) (1) 44. If (Gie is PM) and (Gpec is PB) then (DU1 is PB) (1) 45. If (Gie is PS) and (Gpec is PB) then (DU1 is PB) (1) 46. If (Gie is Z) and (Gpec is PB) then (DU1 is NM) (1) 47. If (Gie is NS) and (Gpec is PB) then (DU1 is NM) (1) 48. If (Gie is NM) and (Gpec is PB) then (DU1 is Z) (1) 49. If (Gie is NB) and (Gpec is PB) then (DU1 is Z) (1) |
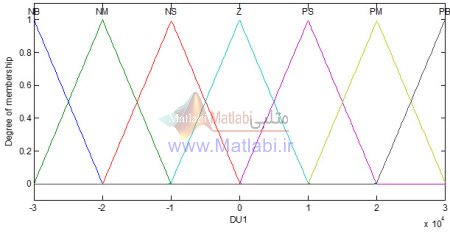
توابع عضویت ورودی
توابع عضویت مربوط به خروجی فازی
توابع عضویت مربوط به ورودی ها
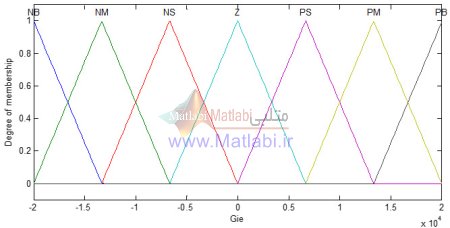
توابع عضویت مربوط به ورودی 1 (Gie)
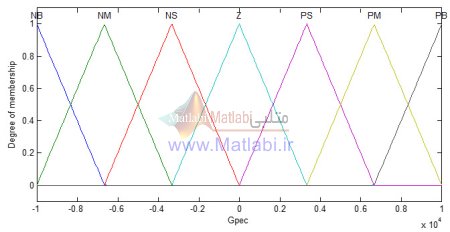
توابع عضویت مربوط به ورودی 2 (Gpec)
پس از اعمال قوانین فازی، نتیجه خروجی فازی به صورت زیر می باشد:
با تغییر نام FC1 به FC2 در کد فوق و سپس اجرای آن می توانید نتایج را برای سیستم فازی 2 (مربوط به U2) طراحی شده نیز ببینید.
در کنترل کننده جدید سیستم کنترل کننده PID به فرم Fuzzy_PID زیر تبدیل می یابد:
مقایسه عملکرد کنترل کننده PID و Fuzzy_PID در زیر نشان داده شده است (Fuzzy_PID.slx)
…
نتیجه:
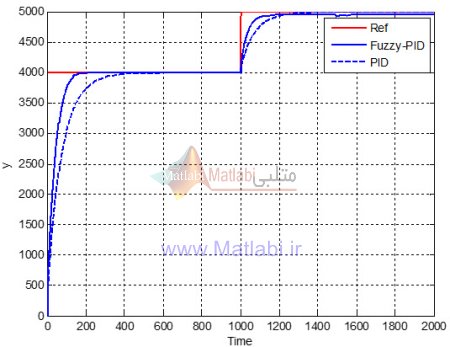
همانطور که مشاهده می شود عملکرد بهتر کنترل کننده fuzzy_PID در مقایسه با PID نشان داده شده است
PID Controller, Fuzzy Logic Controller, Self tuning controller, CSTR ,ISE,IAE, پروژه متلب, پروژه matlab , شبیه سازی با متلب
شبیه سازی
Fuzzy model-based predictive control of dissolved oxygen in activated_sludg processes
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.