
توضیحات
بازشناخت الگوی نیروهای یاتاقانی محور چرخان صلب دارای نامیزانی های جرمی
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 12 صفحه ای می باشد.
دارای گزارش ویدیویی 45 دقیقه ای می باشد.
چکیده
توضیحات پروژه بازشناخت الگوی نیروهای یاتاقانی
برای حل عددی معادلات دیفرانسیل در متلب حل کننده های مختلفی وجود دارند. مثلا ode45، ode15، ode15s، ode113 و … که هرکدام الگوریتم حل عددی مربوط به خود را دارند. شبیه سازی مدل روتور چرخان در مقاله با الگوریتم آدمز-بشفورث انجام شده است که حل کننده ی ode113 در متلب از این روش برای حل عددی استفاده میکند.
روش کار به این ترتیب است که روابط مربوط به معادله ی دیفراسیل، باید در فایلی به عنوان تابع در متلب نوشته شود و این تابع در برنامه اصلی که در همان پوشه است توسط دستور ode113 حل عددی شود. در گزارش این پروژه به جزییات کدنویسی نیز پرداخته شده است.
بررسی تاثیر تغییر اختلاف زاویه دو جرم متقارن در آنبالانسی دینامیکی در الگوی نیروهای یاتاقانی
در این قسمت روال کار به این شرح است که یک اختلاف زاویه ی اولیه برای نامیزانی ها (در اینجا صفر) در نظر میگیریم و مسئله در یک بازه ی زمانی حل عددی میشود سپس یک گام به اختلاف زاویه بین نامیزانی ها اضافه شده و دوباره مسئله حل میشود. به همین ترتیب تا آخرین گام جلو رفته و مسئله به ازای هرکدام از این گام ها حل میشود و در نهایت نمودارهای بدست آمده از تمام مراحلی که حل عددی شده است در یک پنجره ی رسم نمودار در متلب رسم میشود.
در زیر نتایج بدست آمده از شبیه سازی با متلب نمایش داده شده است.
دقت کنید در هر بخش نمونه ای از نتایج قرار داده شده و در ویدیوی همراه پروژه نحوه تغییر زاویه و بدست آوردن نتایج دیگر نیز توضیح داده شده است.

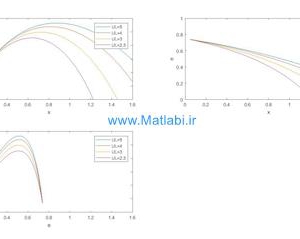
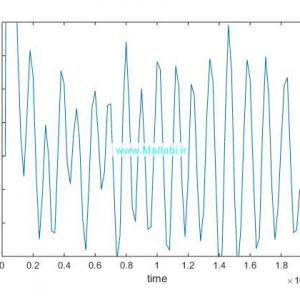
شکل3: نمودار تغییرات نیروهای یاتاقانی در اختلاف زاویه های مشخص نامیزانی های جرمی
شماره هر شکل متناظر با همان شماره شکل در مقاله است.

شکل8: نمودار شیفت فاز نیروهای یاتاقانی برحسب اختلاف زاویه بین نامیزانی های جرمی

شکل4: نمودارهای نیروهای یاتاقانی که با تغییر فاصله ی بین دو نامیزانی رسم شده اند با اختلاف زاویه ی 0 درجه
بررسی تاثیر تغییر فاصله ی بین دو جرم نامیزان در آنبالانسی دینامیکی متقارن بر روی محور چرخان
در این قسمت حالتی از تاثیر فاصله بررسی میشود که در آن فاصله ی نامیزانی جرمی به طور متقارن از دو یاتاقان تغییر میکند. کد متلب این قسمت نیز کاملا مشابه قسمت قبلی است با این تفاوت که دو نامیزانی ابتدا در فاصله ی یک متری از دو یاتاقان ها هستند و با گام مشخص از هم دور شده تا نهایتا روی یاتاقان ها قرار میگیرند.

شکل5: نمودارهای نیروهای یاتاقان با توجه تغییر فاصله دو نامیزانی به صورت متقارن برای اختلاف زاویه ی 110 درجه
بررسی تاثیر فاصله ی بین دو جرم نامیزان در آنبالانسی دینامیکی روتور اوورهانگ
در روتور اوورهانگ جرمها بین دو یاتاقان نیستند و در پشت یکی از یاتاقانها قرار دارند. کد این قسمت نیز شبیه قسمتهای قبلی است، با این تفاوت که مقادیر فاصله از یاتاقان به صورت منفی وارد میشوند.

شکل6: نمودار تاثیر اختلاف فاصله ی نامیزانی های جرمی در نیروهای یاتاقانی در روتور اوورهانگ برای اختلاف زاویه ی 135 درجه
بررسی تاثیر فاصله ی مرکز دو جرم نامیزان در آنبالانسی دینامیکی روتور اوورهانگ
در این حالت یکی از جرمها روی یاتاقان ثابت است و جرم دیگر از فاصله ی 2m- با گام مشخص شروع به حرکت کرده و به سمت آن می آید.

شکل7: اثر فاصله ی مرکز دوجرم نامیزانی بر نیروهای یاتاقانی در اختلاف زاویه ی 0 درجه
همانطور که مشاهده می شود نتایج منطقی و قابل قبولی از شبیه سازی بدست آمده است.
شاید به موارد زیر نیز علاقه مند باشید:
- بررسی تئوری و پارامتریک عملکرد میراگر ضربه ای قطر متغیر در ارتعاشات آزاد سیستم یک درجه آزادی
- آشکارسازی خطا در شبکه های سنسوری وایرلس
- پروژه شناسایی سیستم با متلب
- تأثیر تغییر در مقاومت روتور بر عملکرد دینامیکی موتور القایی
کلیدواژه:
نامیزانی جرمی, روتور صلب, عیوب دینامیکی روتور, بازشناخت الگوی نیروها, هوش مصنوعی
شبیه سازی بازشناخت الگوی نیروهای یاتاقانی محور چرخان صلب دارای نامیزانی های جرمی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.