توضیحات
Path planning for autonomous mobile robot navigation with ant colony optimization and fuzzy cost function evaluation
ترجمه فارسی موضوع مقاله: برنامه ریزی مسیر برای ناوبری مستقل ربات سیار با بهینه سازی کلونی مورچه و ارزیابی تابع هزینه فازی
ربات دارای 3 موتور و 4 درجه آزادی می باشد . و 5 ورودی و 2 خروجی دارد که تمام ورودی خروجی ها و قواعد در فایل فرستاده شده فازی انجام داده ام.
این شبیه سازی را خودم با الگوریتم ژنتیک+فازی انجام داده ام ،تابع هزینه F = OUT(1)(IN1+IN2+IN3+IN4)+OUT(2)IN5 استفاده شده است.
برنامه در متلب پیاده سازی شده است و رابط گرافیکی توسط GUI به آن افزوده گردیده است.
کافی است فایل mobile robot ACO را اجرا نمایید:
ترتیب مراحل در فایل نوشته شده است.
تعداد موانع و مسیر ابتدا و انتها را به ترتیب در مرحله 2 و 3 روی شکل باید مشخص کنید.
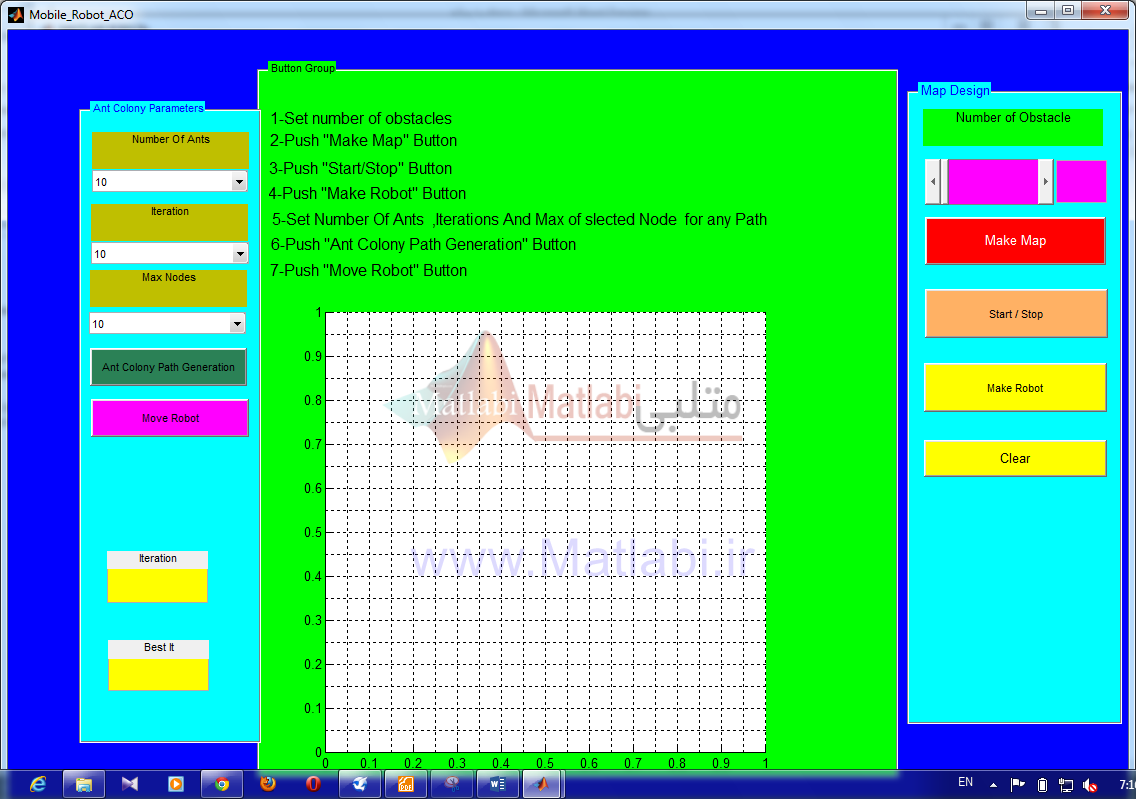
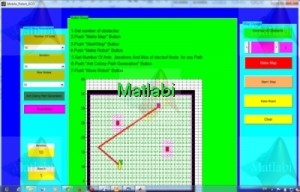
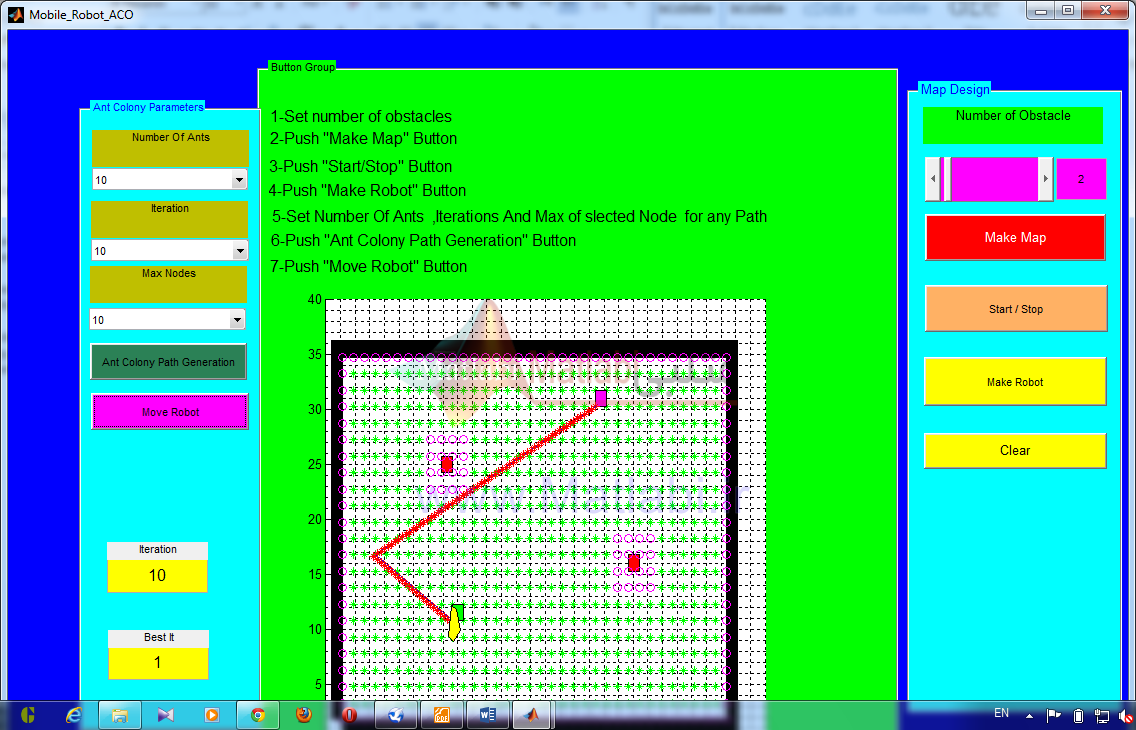
نمونه اجرای برنامه GUI متلب :
 در حال طی مسیر
در حال طی مسیر
و رسیدن به انتها:
کنترل فازی، الگوریتم مورچگان، بهینه سازی، ربات
Ant colony optimization, Autonomous mobile robot navigation, Fuzzy Logic, Path planning, Simple tuning algorithm
شبیه سازی مقاله Path planning for autonomous mobile robot navigation with ant colony optimization and fuzzy cost function evaluation
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.