توضیحات
Passivity Based Adaptive Control of Robotic Manipulators Electrically Controlled
ترجمه فارسی موضوع مقاله: کنترل تطبیقی پسیو ، کنترل کننده های بازوی رباتیک با کنترل الکتریکی
ترجمه ندارد.
گزارش در حد توضیحات همین صفحه است.
شبیه سازی در محیط ام فایل انجام شده است.
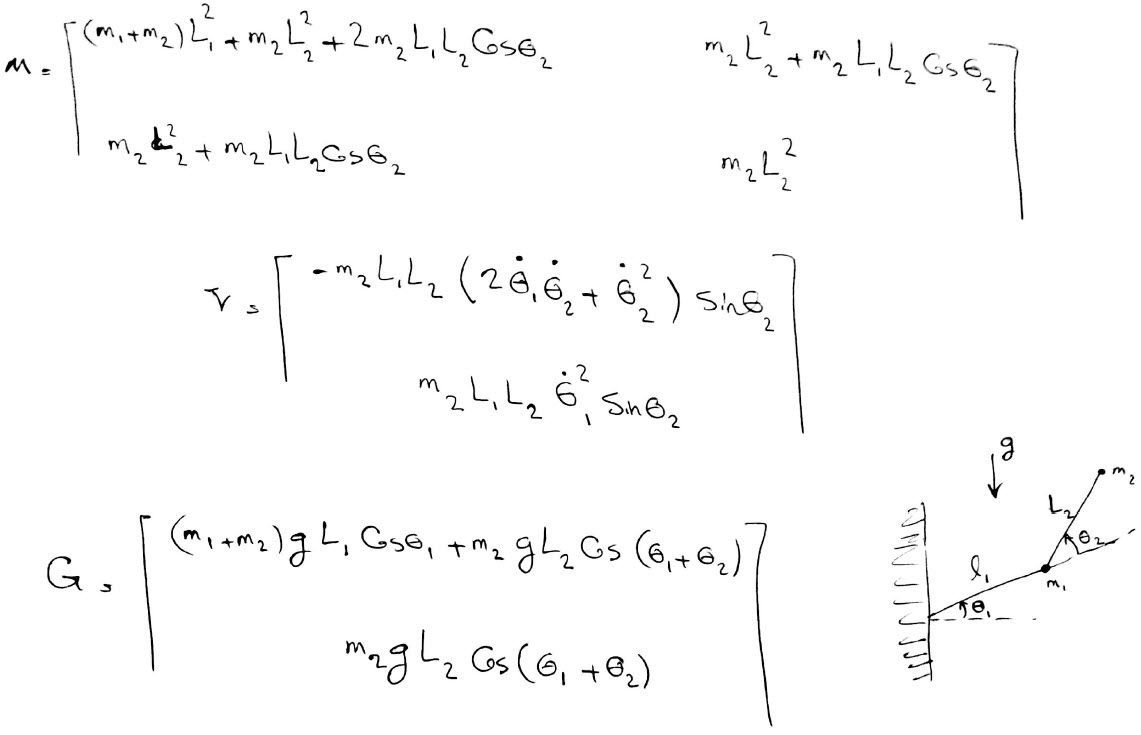
معادلات ربات دو لینکی زیر را در نظر بگیرید.
هدف: شبیه سازی هر لینک ربات طبق روش مقاله
مدل انتخاب شده برای ربات دو لینکی مورد نظر از رابطه 4 مقاله پیوست می باشد.
پارامترهای ربات دو لینکی در انتهای مقاله داده شده است.
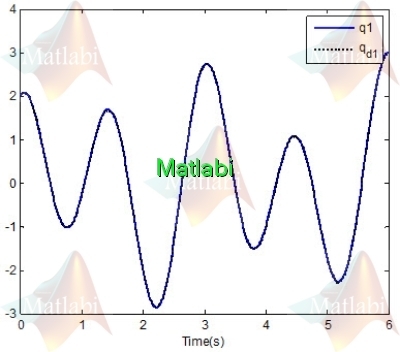
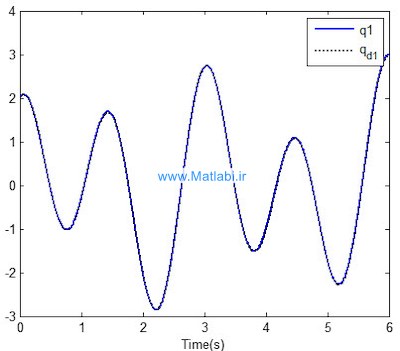
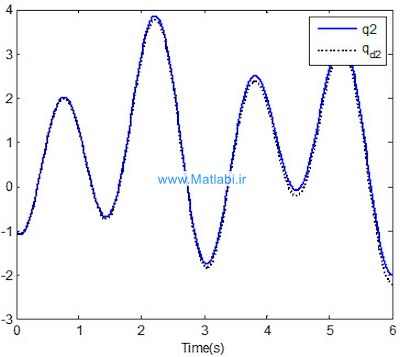
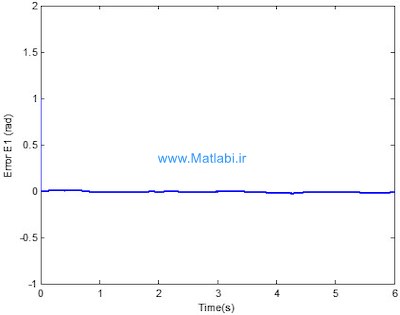
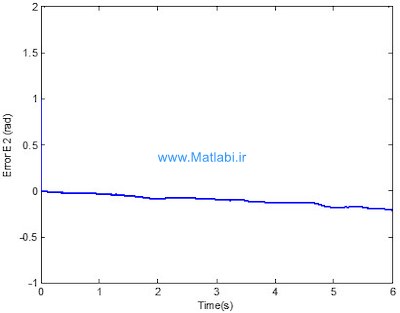
هدف دنبال کردن مسیر دلخواه توسط بازوهای ربات می باشد.
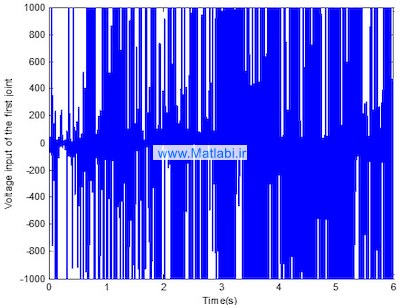
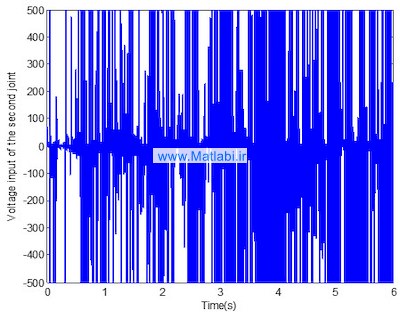
نتایج بدست آمده از شبیه سازی برای خروجی، خطا و سیگنال کنترلی به صورت زیر می باشد :
تابع ginv برای محاسبه معکوس عمومی ماتریسهای بکار می رود.
کلید واژه: Actuator, Adaptive Control, Output Tracking, Passivity, Robot Control
شبیه سازی
Passivity Based Adaptive Control of Robotic Manipulators Electrically Controlled
طبق توضیحات فوق تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





