توضیحات
Optimal transient droop compensator and PID tuning for load frequency control in hydro power systems
مجموعه فایل های متلب با مشخصات زیر تهیه شده است:
1- فایل Main.m که فایل اصلی بوده و با اجرای آن نتایج شبیه سازی انجام شده بر روی نمودارهایی ترسیم میشوند.
2- فایل LNP_OBJ.m که تابع هزینه مسئله برنامه ریزی خطی را با متلب پیاده سازی کرده است.
3- فایل LNP.m که قید های مسئله برنامه ریزی خطی را با متلب پیاده سازی کرده است.
4- فایل NNP_OBJ.m که تابع هزینه مسئله برنامه ریزی غیرخطی را با متلب پیاده سازی کرده است.
5- فایل NNP.m که قید های مسئله بهینه سازی غیرخطی را با متلب پیاده سازی کرده است.
6- فایل های سیمولینک متلب که سناریوهای مختلفی را جهت ارزیابی روش پیاده سازی می کنند.
توجه: دقیقا مشابه مقاله و حتی با مقادیر داده شده در مقاله این شبیه سازی انجام شده، مقادیر عددی مقاله هیچ نوع هماهنگی با هم نداشته و جواب منطقی نمی داد.
بنابراین تلاش شده تا با اعداد مقالات مرجع شبیه سازی انجام شود و جواب هایی حاصل شود که با تئوری مقاله همخوانی دارد.
در ابتدا باید گفت که بلوک دیاگرام شکل 1 مقاله صحیح نیست. در بلوک دیاگرام شکل ذیل،
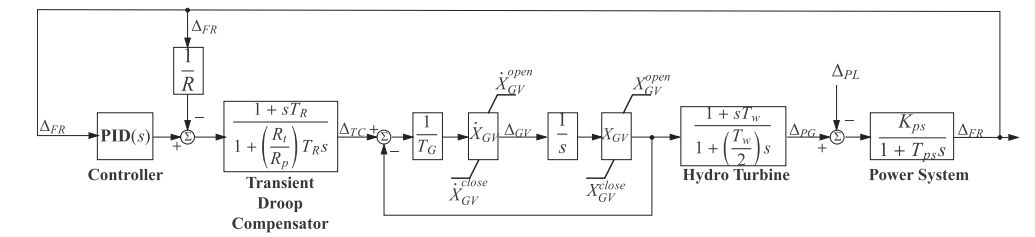
تابع تبدیل Hydro Turbine طبق مقالات مرجع باید در نظر گرفته شود. در این معادله باید در صورت تابع به جای مثبت از منفی استفاده شود که در رفرنسها نیز به همین صورت است.
اگر به شکل 13 مقاله نیز توجه شود درستی و صحت این مطلب را خواهید یافت.
به منظور انجام شبیه سازی با متلب، در ابتدا لازم است یک سیستم مرجع انتخاب کنیم تا مطابق مطالب پیوست مقاله، داده های ورودی و خروجی مطلوب جبران ساز و کنترل کننده PID را در اختیار ما قرار دهد.
سپس به کمک مسئله بهینه سازی 7 مقادیر پارامترهای رابطه 4 را برای سیستم مورد نظر به گونه ای بیابیم که رابطه ورودی خروجی مورد نظر حاصل شود. در پایان نیز با حل مسئله بهینه سازی غیرخطی رابطه 8 پارامترهای کنترل کننده PID و جبران ساز را بدست آوریم.
برای انجام شبیه سازی با متلب ، ابتدا به جمع آوری داده می پردازیم.
برای این منظور فایل های سیمولینک 1 و 2 آماده شده اند. توجه شود مقادیر پارامترها به نحوی تعیین شده است که جواب سیستم مرجع تا حدود زیادی به مقاله شبیه باشد.
%==========================================================================
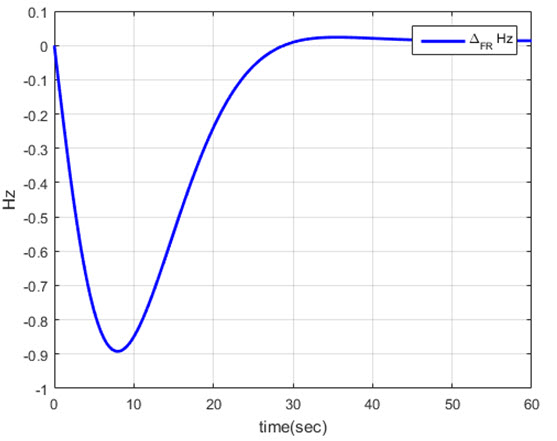
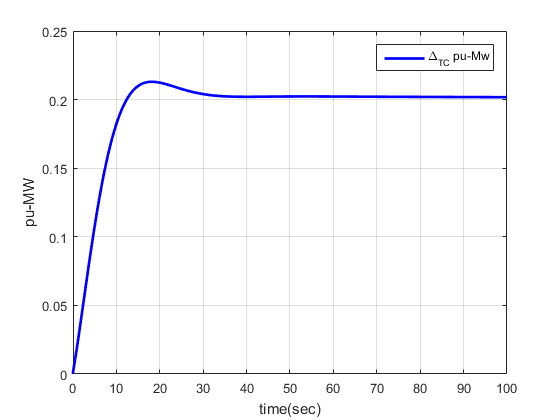
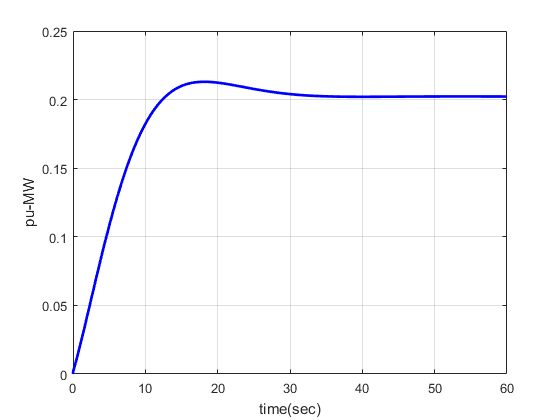
نتایج حاصل از اجرای این شبیه سازی به شرح ذیل است.
شکل 19 مقاله
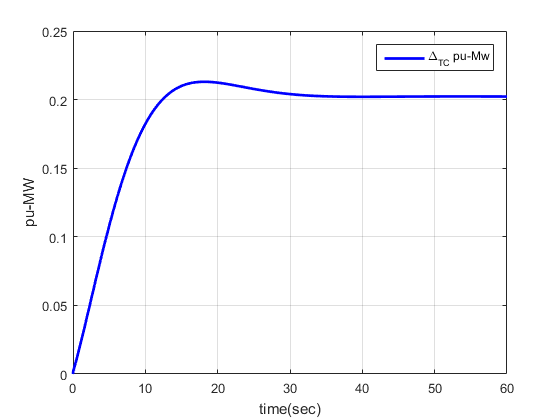
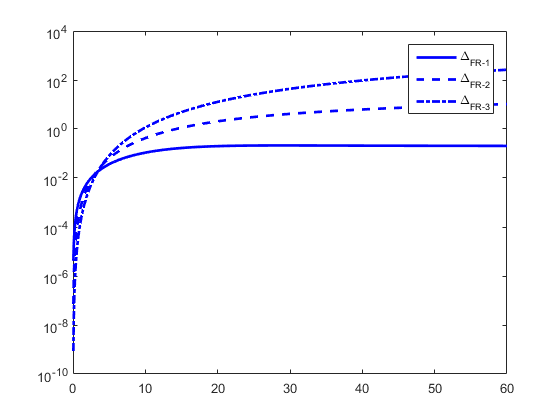
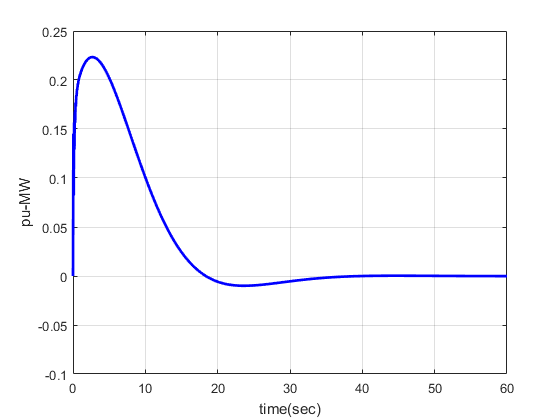
شکل 20 مقاله
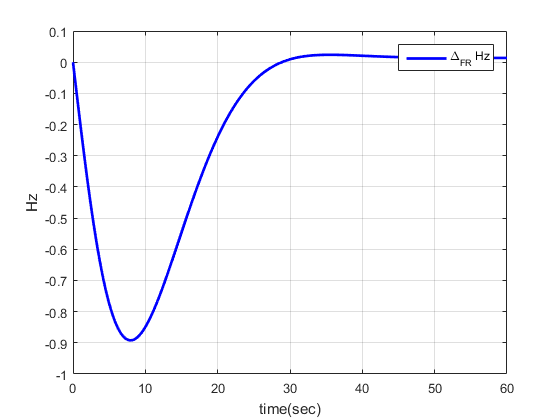
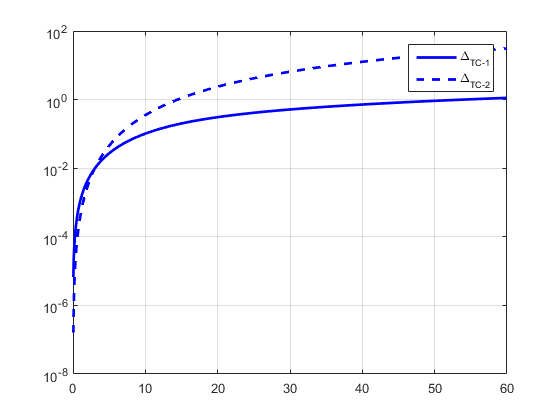
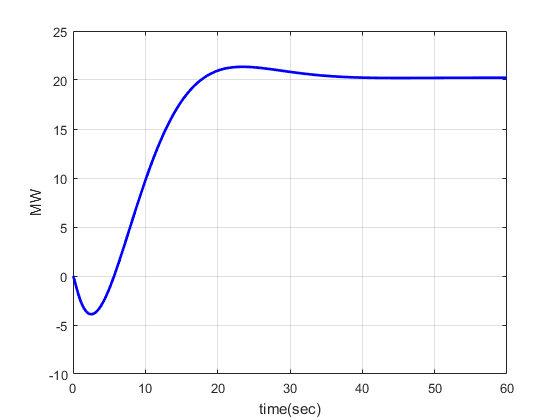
شکل 21 مقاله
به منظور پیاده سازی الگوریتم بهینه سازی برای یک سیستم خاص لازم است انتگرال های متغیرها را مطابق روابط 4 و 5 و 6 مقاله محاسبه کنیم
شکل 4 مقاله
شکل 5 مقاله
با در دست داشتن داده های ذکر شده، می خواهیم برای یک سیستم خاص پارامترهای کنترل کننده و جبران ساز را به نحوی بیابیم که به پاسخ های مورد نظر دست یابیم.
در شکل 6 پاسخ سیستم مورد نظر و پاسخ سیستم طراحی شده پس از یافتن پارامترها بر روی هم ترسیم شده است. واضح است که پارامترها طوری یافت شده اند که پاسخ ها مشابه باشند.
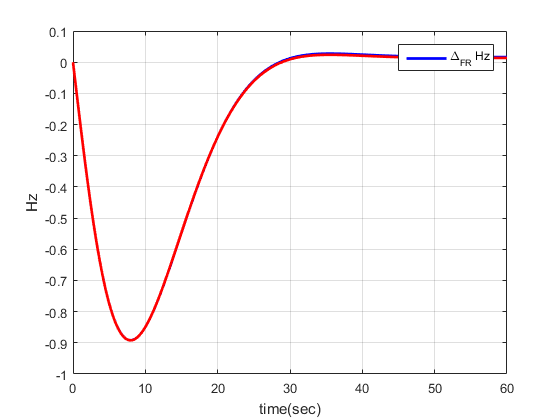
شکل 6: پاسخ مطلوب و پاسخ سیستم طراحی شده
سایر متغیرهای سیستم نیز به صورت ذیل ترسیم شده اند.
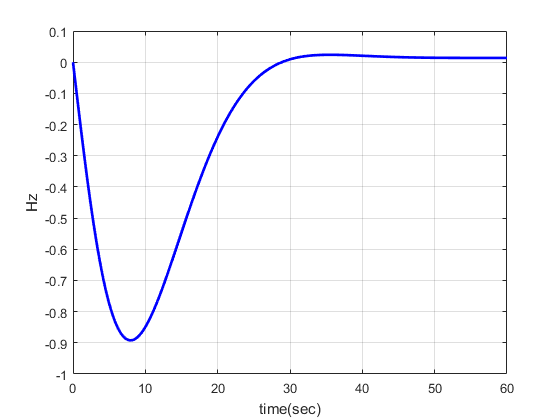
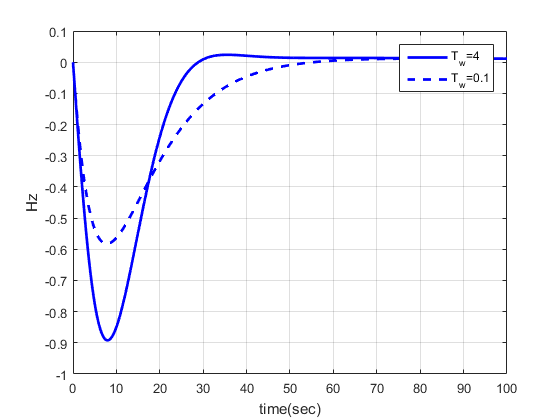
به منظور انجام آنالیز حساسیت، پاسخ سیستم برای دو حالت Tw=4 و Tw=0.1 در شکل ذیل ترسیم شده است.
در مورد شکل 13 مقاله و همچنین شبیه سازی اون هیچ اطلاعاتی که به وسیله آنها شبیه سازی رو انجام داد در مقاله مذکور و مراجع موجود نیست, به همین دلیل پیاده سازی نشده است.
کلید واژه:
Time response specification , Linear and non linear programming , Parameters tuning , Load frequency control
شبیه سازی مقاله Optimal transient droop compensator and PID tuning for load frequency control in hydro power systems
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.