
توضیحات
طراحی بهینه کنترل کننده مقاوم در برابر خطا برای سیستم فرمان برقی با نقص سنسور با استفاده از الگوریتم PSO
عنوان اصلی مقاله:
Optimal Design of Fault-Tolerant Controller for an Electric Power Steering System with Sensor Failures Using Genetic Algorithm
همانطور که مشاهده می شود مقاله با الگوریتم ژنتیک کار را انجام داده است, اما این پروژه با الگوریتم ازدحام ذرات (PSO) انجام شده است.
بدین منظور از تولباکس آماده متلب برای الگوریتم PSO استفاده شده است.
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 6 صفحه ای می باشد.
توضیحات پروژه طراحی بهینه کنترلر مقاوم در برابر خطا
شبیه سازی شامل سه ام فایل است:
فایل cost_function:
این کد شامل معادلات مربوط به تابع هزینه می باشد و در مقاله با عناوین قضیه 1 و 2 بیان گردیده است. در این بهینه سازی 2 متغیر داریم که m و t نام دارند. این ها دو عدد اسکالر هستند که به ترتیب در یک ماتریس همانی 6 در 6 و 3 در 3 ضرب می گردند و ماتریس های وزنی Q و R مربوط به کنترل مبتنی بر LQR را تشکیل می دهند.
فایل step_impulse_response:
در این کد، پاسخ زمانی به ورودی پله و یا ضربه محاسبه می گردد و با آن می توان شکل های مقاله را تولید نمود.
فايل main:
فایل اصلی که شبیه سازی با آن اجرا می شود.
نتایج شبیه سازی با متلب
در تمام نمودارهایی که در ادامه آورده می شود شماره متناظر با شکل مقاله در بالای آن نوشته شده است. دقت کنید که به دلیل عوض شدن روش، قدری تفاوت در نمودارها دیده می شود. مانند زمان رسیدن به صفر، نوع رسیدن به صفر و … ولی دقت کنید که اصول نمودارهای مقاله به طور کامل رعایت شده است و به راحتی می توان نتایج را با مقاله مقایسه نمود.
همچون مقاله پاسخ زمانی پله و ضربه به صفر رسیده است و با خطا در سنسورها انحراف زیادی به وجود نیامده است و سیستم واگرا نشده است.

Figure 4: The step response of EPS system with a sensor failure

Figure 5: The bump response of EPS system with a sensor failure
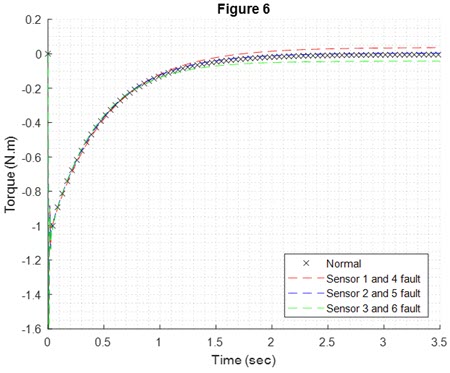
Figure 6: The step response of EPS system with two sensor failure

Figure 7: The impulse response of EPS system with two sensor failure

Figure 8: The step response of EPS system with the failure of sensor 6
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل انحراف خودرو با فیدبک خروجی Hبینهایت مقاوم با استفاده از فرمان چرخ جلو فعال
- يك سيستم كنترل غيرخطی فرمان فعال برای افزايش پايداری جانبي خودرو
- استراتژی کنترل جدید برای تبدیل دو جهته DC-DC در خودرو برقی
- امکان سنجی کاربرد خودروهای برقی بعنوان نیروگاه های تولید پراکنده
کلیدواژه:
fault-tolerant control (FTC), electric power steering, PSO
کنترل تحمل خطا, الگوریتم ازدحام ذرات, کنترلر مقاوم به خطا
طراحی بهینه کنترل کننده مقاوم در برابر خطا برای سیستم فرمان برقی با نقص سنسور با استفاده از الگوریتم PSO با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.