توضیحات
طراحی کنترلر بهینه LQR و LQG برای سیستم آونگ معکوس با متلب
عنوان مقاله:
Optimal Controller Design for Inverted Pendulum System: An Experimental Study
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش مختصر 3 صفحه در قالب ورد است.
توضیحات پروژه طراحی کنترل کننده بهینه سیستم آونگ معکوس
در این پروژه, شبیه سازی بخش 4 فایل Optimal Controller Design for Inverted Pendulum System: An Experimental Study انجام شده است. بطوریکه نتایج خروجی شبیه سازی شامل شکل 4.4 و 4.5 آن می باشد. نکته: شکل 4.6 مربوط به نتایج آزمایشگاهی هست و قابل رسم نیست.
شبیه سازی شامل 4 ام فایل به صورت زیر است:
بخش از گزارش و توضیحات فایل ورد در مورد شبیه سازی را در زیر, جهت نمونه آورده ایم:
خطوط 10 تا 17: ماتریس های سیستم خطی شده
خطوط 20 تا 22: ضرایب بهره و نیز ضریب کنترلی LQR
خطوط 25 تا 28: ضریب فیلتر کالمن
خط 31: حل مساله LQR
خط 33: حل مساله LQG
خط 35: حل مساله بدون کنترل
…
نتایج بدست آمده از شبیه سازی به شرح زیر است:
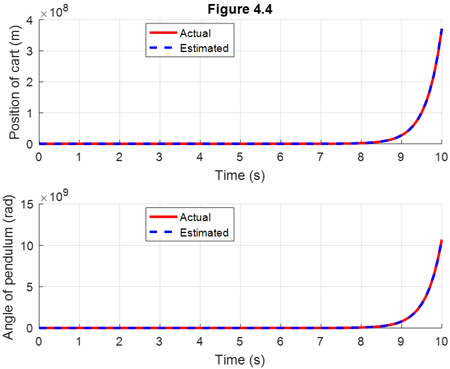
Figure 4.4. Comparison of Estimated States of Kalman Filter with the Actual States
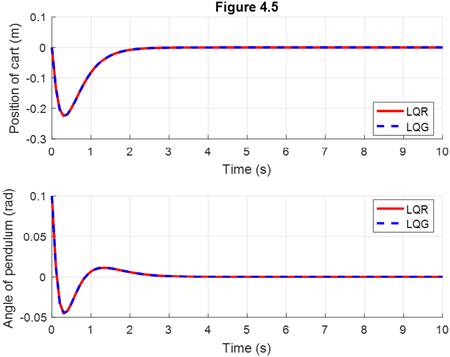
Figure 4.5.Time response of the Inverted Pendulum system for position and the angle of the Cart
همانطور که مشاهده میشود نتایج عینا مشابه مقاله بدست آمده است.
شاید به موارد زیر نیز علاقه مند باشید:
- سیستم دینامیکی آونگ با متلب
- مدلسازی و شبیه سازی برای کنترل بهینه غیر خطی پاندول معکوس سیستم های دینامیکی با استفاده از PID کنترلر و LQR
- کنترل LQG LTR موتور القایی
کلیدواژه:
سیستم پاندول معکوس, کنترلر LQR, کنترلر LQG
Inverted Pendulum System, Linear Quadratic Regulator, Linear Quadratic Gaussian
شبیه سازی و طراحی کنترلر بهینه LQR و LQG برای سیستم آونگ معکوس با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.