توضیحات
کنترل بهینه سیستم چند ورودی چند خروجی پرنده دو روتور با روش LQR
عنوان اصلی مقاله:
Optimal Control of Twin Rotor MIMO System Using LQR Technique
شبیه سازی در محیط سیمولینک متلب انجام شده است.
دارای ترجمه مقاله در قالب ورد است.
دارای ویدیوی توضیحات در مورد شبیه سازی و نتایج آن در حدود 5 دقیقه می باشد.
توضیحات پروژه کنترل بهینه MIMO دو روتور با استفاده از تکنیک LQR
ترجمه چکیده مقاله: در این مقاله، سیستم چند ورودی چند خروجی پرنده دو روتور (TRMS)، به عنوان نمونه اولیه راه اندازی آزمایشگاهی هلیکوپتر در نظر گرفته شده است. هدف از مطالعه مدل TRMS و طراحی کنترلر برای آن فراهم کردن بستری برای کنترل پرواز هلیکوپتر است. یک کنترل کننده فیدبک حالت بهینه بر اساس روش تنظیم کننده درجه دوم خطی (LQR) برای سیستم چند ورودی چند خروجی پرونده دو روتور طراحی شده است. TRMS، یک سیستم غیر خطی با دو درجه آزادی و کوپلینگ متقاطع است و مدلسازی ریاضی آن با استفاده از نرم افزار MATLAB/SIMULINK انجام شده است. مدل خطی شده TRMS از مدل غیرخطی آن به دست می آید. نتایج شبیه سازی کنترل کننده بهینه با نتایج کنترل کننده PID معمولی مقایسه شده است. پاسخ بهتر و مناسب تر کنترل کننده پیشنهادی، در حالت گذرا و نیز حالت پایدار نشان داده شده است.
شبیه سازی در محیط سیمولینک متلب 2016 تا 2018 انجام شده است. طبق بخش اصلی مقاله (بخش3) سیمولینک از دو قسمت اصلی روش های کنترلی PID و فیدبک حالت بهینه LQR تشکیل شده است.
نتایج بدست آمده از شبیه سازی با متلب:
سیستم TRMS در محیط سیمولینک با روش های کنترلی فوق شبیه سازی شده است. پاسخ های ورودی های مرجع کنترلر LQR با نتایج حاصل از روش کنترلر PID مقایسه شده اند. درشبیه سازی، پاسخ های گذرا و پایدار به صورت فراجهش، زمان نشست و خطای حالت پایدار مورد ارزیابی قرار گرفته است. مقدار مرجع برای ورودی پله برابر با 0.5 برای صفحه افقی و 0.2 برای صفحه عمودی است. شکل 4 (a و b) پاسخ TRMS در صفحه های افقی و عمودی با روش کنترل PID را نشان می دهد. شکل 4 (c و d) نتایج را برای روش کنترلی بهینه نشان می دهد. شکل 5 (a و b) و شکل 5 (c و d) تلاش کنترلی کنترلرهای PID و بهینه را در صفحه های افقی و عمودی نشان می دهند.
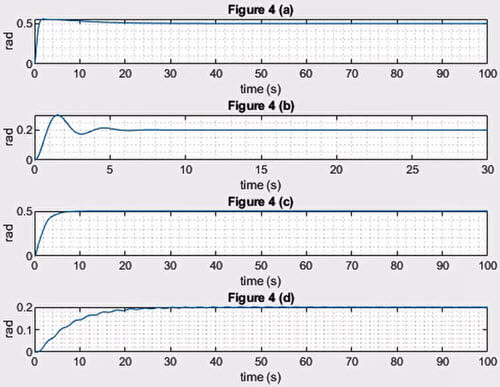
شکل 4 (a) پاسخ پله صفحه افقی با کنترل PID (b) پاسه پله صفحه عمودی با کنترل PID (c) پاسخ پله صفحه افقی با کنترل بهینه (d) پاسخ پله صفحه عمودی با کنترل بهینه
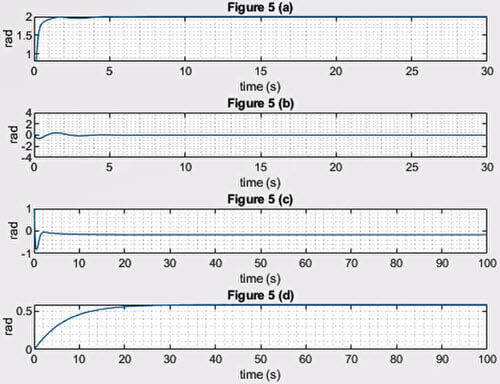
شکل 5 (a) تلاش کنترلی صفحه عمودی با کنترل PID (b) تلاش کنترلی صفحه افقی با کنترل PID، (c) تلاش کنترلی صفحه عمودی با کنترل بهینه، (d) تلاش کنترلی صفحه افقی با کنترل بهینه
نتایج فوق خروجی سیمولینک این پروژه است. همانطور که مشاهده میشود نتایج با دقت مناسبی بدست آمده و تغییر جزیی آن بدلیل عدم وجود پارامترهایی بوده است که در مقاله ذکر نشده.
نتایج نشان می دهد که عملکرد کنترل بهینه در هر دو حالت گذرا و پایا بهتر از PID است. تلاش کنترلی در حالت بهینه مینیمم است و مقدار آن در PID بیشتر می باشد.
شاید به موارد زیر نیز علاقه مند باشید:
- تنظیم MIMO PID برای سیستمهای فاز غیرمینیمم: تعیین محدودیتهای قابل دستیابی برای یک رفتار پایدار
- کنترلر مود لغزشی پایانه فازی تطبیقی MIMO برای دستکاری کننده های رباتیک
- کنترل فازی پایدار برای سیستم های غیرخطی MIMO
- یک روش طراحی کنترل کننده خطی MIMO برای بهینه سازی مقاوم و درجه دوم
- پایداری ورودی به حالت سیستم های غیرخطی مثبت
ورژن دوم شبیه سازی این مقاله را از لینک زیر می توان دریافت کرد:
Optimal Control of Twin Rotor MIMO System Using LQR Technique
کلیدواژه:
سیستم چند ورودی چند خروجی پرنده دو روتور, تنظیم کننده درجه دو خطی (LQR), وسیله پرنده بدون سرنشین (UAV)
Twin rotor MIMO system, Linear quadratic regulator (LQR), Unmanned air vehicle (UAV)
کنترل بهینه سیستم چند ورودی چند خروجی پرنده دو روتور با روش LQR با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.