توضیحات
یادگیری آنلاین مانع-بازیگر-منتقد برای کنترل ∞H با محدودیت های حالت کامل و اشباع ورودی
عنوان اصلی مقاله
Online barrier-actor-critic learning for H∞ control with full-state constraints and input saturation
این مقاله در مورد یک روش طراحی کنترل بهینه تطبیقی است که محدودیتهای کامل حالت و اشباع ورودی را در برابر اختلال خارجی در نظر میگیرد.
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش ورد 4 صفحه ای به زبان لاتین است.
توضیحات پروژه کنترل بهینه تطبیقی
نکته مهم: در این مقاله تنها مورد مانع- بازیگر- منتقد (barrier-actor-critic) توضیح داده شده و مورد کلاسیک- بازیگر- منتقد(actor-critic) بیان نشده است. بنابراین، فقط نمودارهای مانع-بازیگر-منتقد رسم شده است.
barrier actor critic یک روش یادگیری تقویتی است که از تابع مانع (barrier function) برای حفظ ایمنی و تابع لیاپانوف (Lyapunov function) برای تضمین پایداری سیستم استفاده میکند. این روش با استفاده از الگوریتم actor-critic، سیاست بهینه کنترل را یاد میگیرد که هم محدودیتهای حالت و ورودی را رعایت میکند و هم در برابر اختلال خارجی مقاوم است.
شبیه سازی شامل 3 ام فایل است.
Regression_function.m: این فایل m. تابع رگرسیون ϕ(s) و گرادیان آن را با توجه به s (Δφ=∂φ/∂s) تولید می کند. تابع رگرسیون (خط 2) در مقاله ذکر نشده است. بنابراین یک تابع مناسب معرفی می شود که به نتایج مناسب نزدیک به نتایج مقاله کمک می کند.
Barrier_actor_critic.m: این m.file معادلات اصلی مقاله را دارد.
main.m: شبیه سازی را با این m.file اجرا کنید.
خط 5: مقادیر اولیه.
خط 6: معادلات را با روش ode45 حل میشود.
خطوط 9 تا انتها: نمودارها.
واضح است که نتایج بسیار نزدیک به مقاله است.
در زیر نتایج شبیه سازی با متلب را قرار داده ایم:
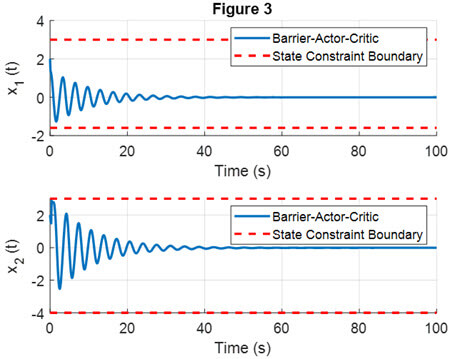
Figure 3: Evolution of the state x(t) by using the presented actor-critic-barrier learning. The dashed line represents the boundary of the safe region.
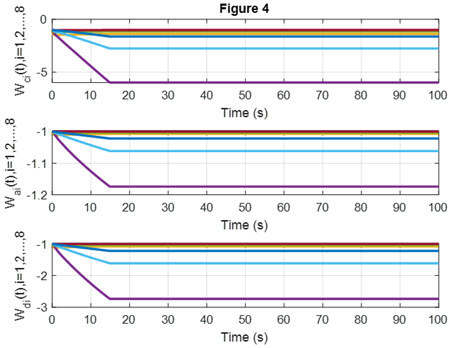
Figure 4: Evolution of the critic weights
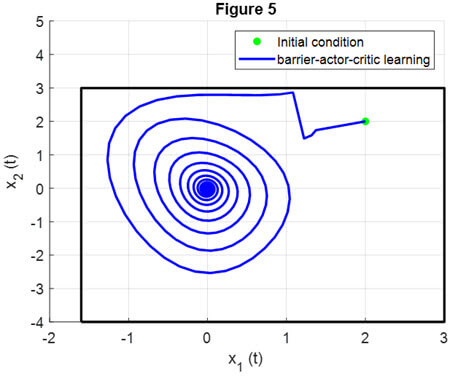
Figure 5: Evolution of the two-dimensional phase plot of the state trajectories [x1(t) x2(t)]. The black box denotes the safe region
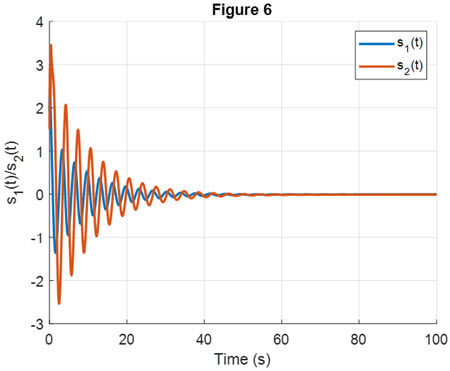
Figure 6: Evolution of the state sptq by using the presented actor-critic-barrier learning and classical actor-critic learning
شاید به موارد زیر نیز علاقه مند باشید:
- کنترل انحراف خودرو با فیدبک خروجی Hبینهایت مقاوم با استفاده از فرمان چرخ جلو فعال
- یک کنترلر پیش بین مدل تثبیت کننده برای تنظیم ولتاژ مبدل بوست DC/DC
- کنترل فازی یک ربات متحرك چرخدار برای دنبال کردن یک مسیر از پیش تعیین شده با سیمولینک متلب
- مدل کنترل پیش بین برای ربات سایز کوچک همه جهته با محدودیت موتور و عدم لغزش
- تخمین پارامترهای مدل prey-predator بااستفاده از الگوریتم ژنتیک
کلیدواژه:
full-state constraints, input saturation, disturbance attenuation, adaptive dynamic programming, barrier-actor-critic learning
یادگیری آنلاین مانع-بازیگر-منتقد برای کنترل Hبینهایت با محدودیت های حالت کامل و اشباع ورودی با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.