توضیحات
Obstacle Avoidance of Mobile Robots in Unknown Environments
دوری کردن از موانع توسط روبات موبایل ها در محیط های ناشناخته
پروژه شامل 3 فایل است. فایل اول، RunFile.m است که فایل اصلی برای اجرای شبیه سازی است.
با اجرای این فایل، مدل سیمولینک اجرا شده و نتایج شبیه سازی نمایش داده میشود.
فایل دوم، فایل Main.slx است که فایل سیمولینک و حاوی مدل ربات و کنترلر فازی است.
فایل سوم، فایل FuzzyController.fis است که شامل قوانین فازی پیاده شده برای کنترلر فازی است.
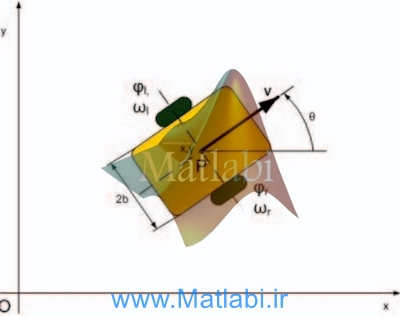
مدل ربات مطرح شده در مقاله، مدل Nonholonomic است که دارای قید حرکتی است.
این مدل، در سیمولینک و در بلوک ModelDynamics پیاده شده است.
کنترلر فازی، شامل قوانین حرکت ربات و توابع تعلق تعریف شده در مقاله هست.
بلوک Saturation برای نگه داشتن مقادیر ورودی در بازه ورودی کنترلر فازی است.
چون اگر مقادیر از این بازه خارج شوند، کنترلر فازی مقادیر نادرستی بعنوان خروجی تولید خواهد کرد.
بلوکهای To Workspace برای ثبت پارامترها در محیط متلب هست که باعث میشود بتوانیم از خروجی شبیه سازی، نمودار بگیریم.
در نهایت، نتیجه شبیه سازی با متغیرهای ارائه شده به شکل زیر است که حاوی محل جسم مزاحم، مسیر حرکت ربات و نقطه هدف است. 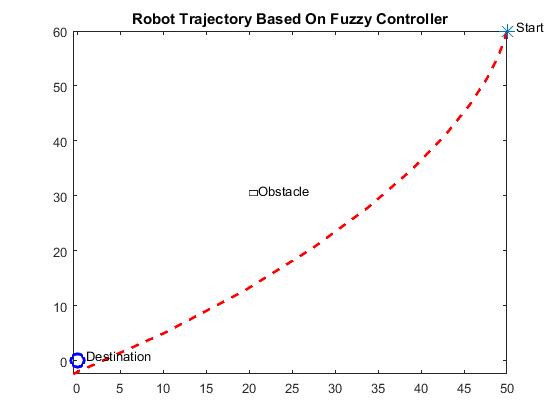
کلید واژه :شبیه سازی با متلب ,پروژه های اماده متلب, matlab,matlab project,پروژه متلب,
autonomous motion, wheeled mobile robot, obstacle avoidance of mobile robots, unknown environments, fuzzy reactive control, angular speed difference, vehicle velocity
شبیه سازی مقاله
Obstacle Avoidance of Mobile Robots in Unknown Environments
توسط کارشناسان متلبی تهیه شده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





