توضیحات
Nonlinear Control of an Induction Motor Using a Reduced-Order Extended Sliding Mode Observer for Rotor Flux and Speed Sensorless Estimation
ترجمه فارسی موضوع مقاله: کنترل غیر خطی یک موتور القایی با استفاده از یک کاهش مرتبه تمدید شده مد لغزشی برای برآورد شار رتور و سرعت بدون سنسور
پروژه درس کنترل مدرن
در زیر برخی معادلات و قسمتی از گزارش نیامده و با خرید محصول قابل دریافت است.
1 و 2 )
معادلات حالت سیستم انتخاب شده به صورت زیر است : …
با فرض متغییرهای سیستم به صورت…
و ورودی سیستم به صورت…
داریم :…
3 و 4 )
در این صورت :..
سیستم را حول مبدا خطی سازی می کنیم :…
در این صورت سیستم خطی سازی شده به صورت زیر است :…
فرم ماتریسی فضای حالت به صورت زیر است :…
برای بررسی پایداری سیستم ، قطب های سیستم را بررسی می کنیم ، اما توجه داشته باشید چون سیستم ، یک سیستم چندمتغیره است ، فقط نوع قطب ها را بدست می آوریم .
و لذا قطب های سیستم پایدار می باشند .
5 )
با بدست آوردن ماتریس های کنترل پذیری و روئیت پذیری برای سیستم ، مشاهده می کنیم که رتبه ماتریس کنترل پذیری برابر 3 بوده و لذا این ماتریس رتبه ناقص است و این یعنی سیستم کنترل ناپذیر است ، از طرف دیگر با بدست آوردن ماتریس روئیت پذیری مشاهده می کنیم که این ماتریس رتبه کامل بوده و لذا سیستم روئیت پذیر است .
6 )
به خاطر این که سیستم دو ورودی دارد لذا تابع تبدیل سیستم با ابعاد ظاهر می شود :…
مشاهده می شود که سیستم چند متغییره است اما اغلب در موتورها چون استاتور و روتور از یک منبع تغذیه می شوند ، لذا ما فرض می کنیم که . که در این صورت به یک سیستم SISO دست پیدا می کنیم که تابع تبدیل این سیستم به صورت زیر است :…
که صفرها و قطب های سیستم به صورت زیر می باشند :…
مشاهده می شود که قطب -0.33 به دلیل اینکه قطب کنترل ناپذیر است در قطب های تابع تبدیل ظاهر نشده اند .
7 )
با استفاده از دستور
[T,J]=jordan(A)
معادلات فضای حالت سیستم را به فرم قطری جردن تبدیل می کنیم . با اجرای دستور فوق در محیط ماتریس تبدیل سیستم به صورت زیر است :
…
که در این صورت فرم فضای حالت به صورت زیر است :
8 )
برای این سوال از دستور
…
استفاده می کنیم که با اجرای این دستور ، ماتریس های جدید را به عنوان خروجی بر می گرداند . با اجرای این دستور داریم :…
9 )
همانطور که می دانیم ، سیستم کنترل ناپذیر است و قطب -0.333 قابل کنترل نیست و نمی توان این قطب را کنترل کرد ، اما سه قطب دیگر که یک فضای حالت با ابعاد 3 را تشکیل می دهد ، قابلیت جایابی ر1 داشته و در محیط متلب این قطب ها را جایابی می کنیم .
در این صورت با استفاده از دستور place ماتریس بهره فیدبک به صورت زیر می باشد :…
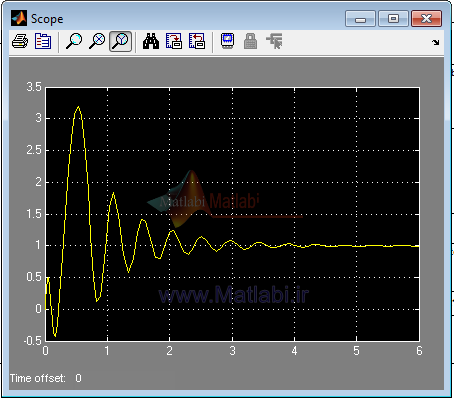
و پاسخ پله سیستم به صورت زیر است :…
10 )
سیستم اصلی به صورت زیر است :…
این سیستم یک سیستم روئیت ناپذیر است . و رتبه ماتریس روئیت پذیری ناقص و برابر 3 می باشد . لذا مدهای روئیت پذیر را از مد روئیت ناپذیر جدا می کنیم و سپس روئیت گر طراحی می کنیم . با استفاده از دستور زیر
[Abar,Bbar,Cbar,T,k] = obsvf(A,B,C)
در نرم افزار متلب ، فرم فضای حالت جدید به صورت زیر می باشد :…
که در آن ماتریس تبدیل به صورت زیر است :…
بنابراین یکی از مدهای سیستم روئیت ناپذیر است و سه مد دیگر روئیت پذیر می باشند ، ما در ادامه برای این مدها روئیت گر طراحی می کنیم .
با استفاده از دستور place ماتریس بهره روئیت گر به صورت زیر است :…
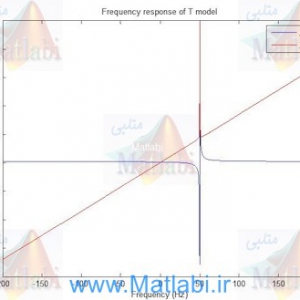
11 )
در این قسمت می خواهیم روئیت گر کاهش مرتبه یافته از مرتبه 2 را طراحی کنیم . بنابراین فرض می کنیم یکی از سه مد قابل اندازه گیری نیست و برای طراحی ، روند زیر را دنبال می کنیم :….
با انتخاب :…
قطب های روئیتگر را در -163.575 و -10 قرار می دهیم .
ماتریس Q را چنان تعیین می کنیم که :…
بنابراین :…
و لذا :…
ماتریس را بدست می آوریم :…
و با استفاده از رابطه مقدار ماتریس T را به صورت زیر بدست می آوریم :
و داریم :…
و در نهایت داریم :…
روئیت گر به صورت زیر است :
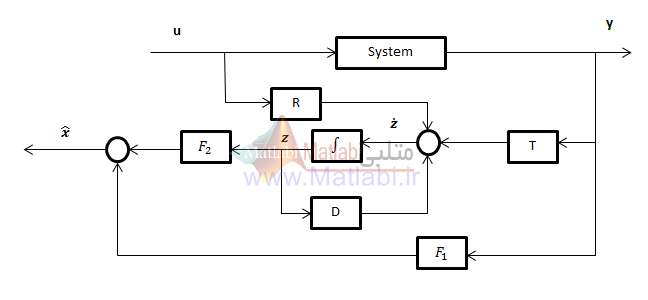
12 )
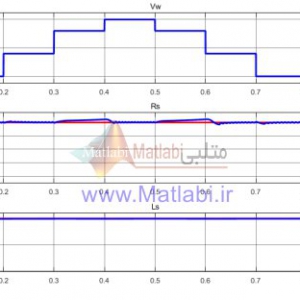
فایل های شبیه سازی برای این سوال آماده شده اند که خروجی سیستم به صورت زیر می باشد :
روئیت گر مرتبه کامل :

روئیت گر مرتبه کاهش یافته :
….
در حالت دوم ، پاسخ با کمی خطا همراه است .
- شرایط اولیه غیر صفر
روئیت گر مرتبه کامل :

روئیت گر کاهش مرتبه یافته :

مشاهده می کنید که در این حالت پاسخ با مقداری خطا همراه می شود .
13 )
شرط اولیه صفر :

شرط اولیه غیر صفر :
مشاهده می شود در صورتی که شبیه سازی با شرایط اولیه انجام می شود ، پاسخ سیستم با فروجهش اولیه روبرو می شود ، اما پس از گذشت زمان خروجی را به خوبی دنبال می کند .
در کل مشاهده می کنیم زمانی که از تخمین گر استفاده می شود خصوصا تخمین گر کاهش مرتبه یافته ، مقداری خطا در خروجی ظاهر می شود .
همچنین ملاحظه می کنیم که برای سیستم خطی سازی شده ، خروجی سریع به حالت ماندگار می رسد ، یعنی سرعت پاسخ سیستم بالاست ، اما در صورتی که سیستم اصلی که یک سیستم غیرخطی می باشد ، برای شبیه سازی مورد استفاده قرار می گیرد ، سرعت پاسخ بسیار کمتر می شود .
و این بهای تقریبی است که از آن در جهت طراحی روئیت گر و کنترلر برای سیستم ، استفاده شده است .
کلید واژه : کنترل مدرن، کنترل غیر خطی مقاوم
Robust Nonlinear Control, Induction Motor, Reduced-Order Extended Sliding Mode Observers, Parameter Estimation
پروژه درس کنترل مدرن با استفاده از Nonlinear Control of an Induction Motor Using a Reduced-Order Extended Sliding Mode Observer for Rotor Flux and Speed Sensorless Estimation
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.