





توضیحات
Neural network-based adaptive sliding mode control design for position and attitude control of a quadrotor UAV
طراحی کنترل مودلغزشی تطبیقی مبتنی بر شبکه عصبی برای کنترل موقعیت و وضعیت یک پهپاد کوادروتور
شبیه سازی در محیط سیمولینک متلب 2017 انجام شده است.
دارای گزارش 7 صفحه ای در قالب ورد است که در آن در مورد شبیه سازی توضیح داده شده است.
توضیحات پروژه
در فایل های پروژه پوشه simulation دو پوشه 1 و 2 قرار دارد. پوشه 1 مربوط به شبیه سازی با مقادیر داده شده در جدول 1 مقاله است. پوشه 2 دارای 25 درصد عدم قطعیت در چهار پارامتر می باشد.
تمام کدها و بلوکهای به کار رفته در دو پوشه یکی می باشد.
برای اجرای شبیه سازی حتما فایل main را اجرا نمایید. این فایل فقط فایل سیمولینک را فراخوانی می کند و در انتها نمودارها را رسم می نماید. تمام کدها و مقادیر داخل مدل سیمولینک است.
مدل های سیمولینک به ورژن 2017a تبدیل شده اند.
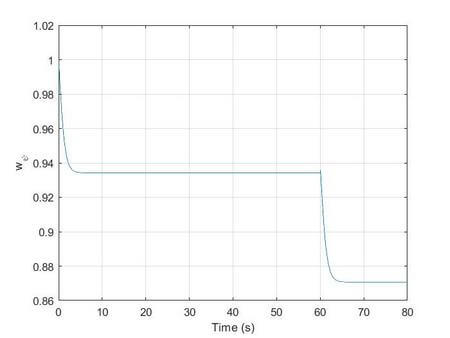
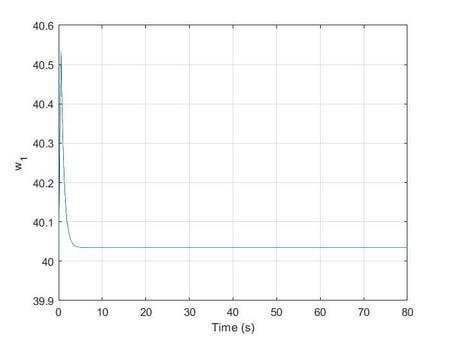
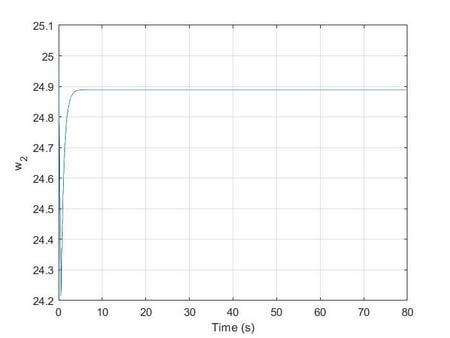
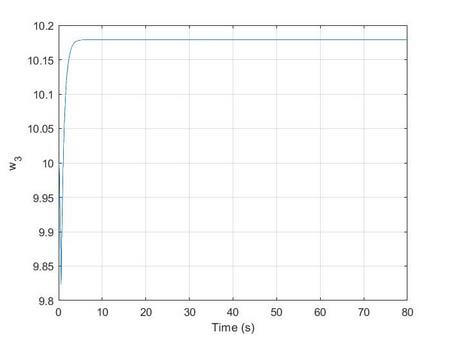
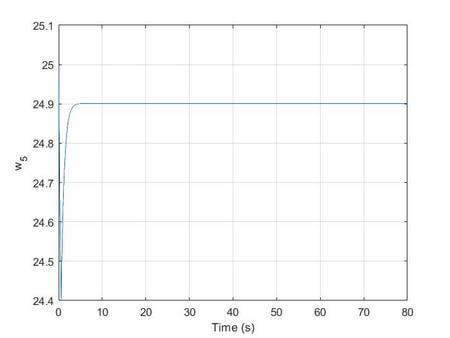
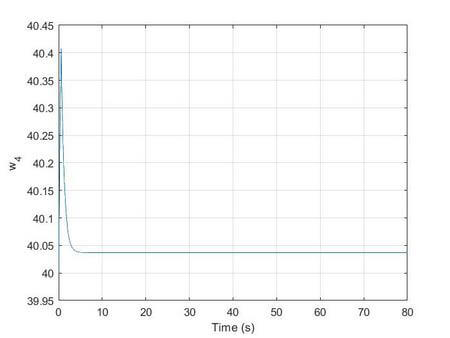
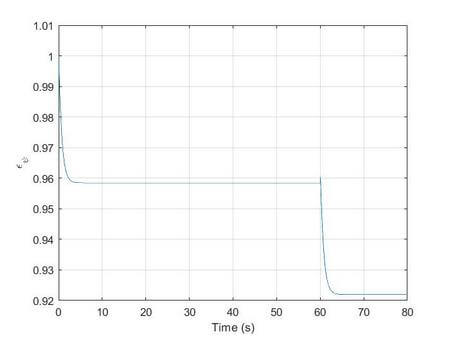
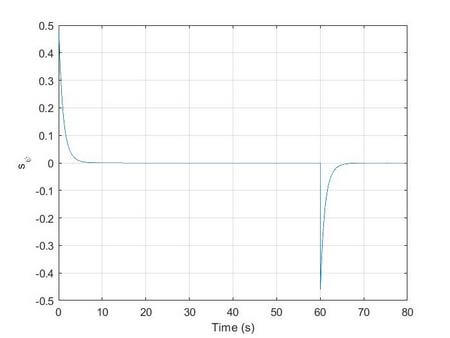
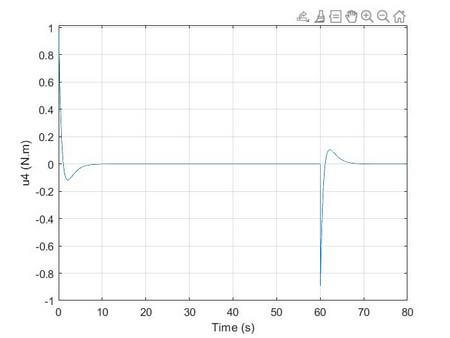
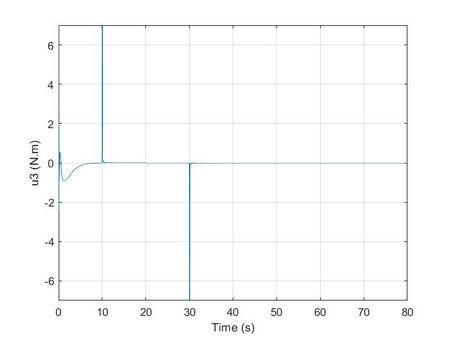
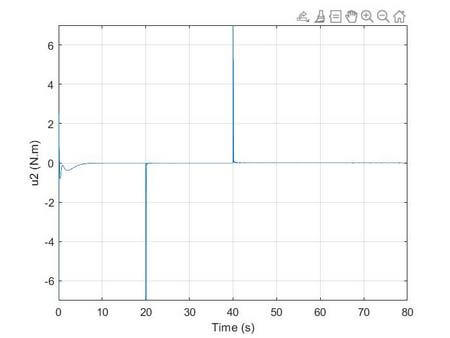
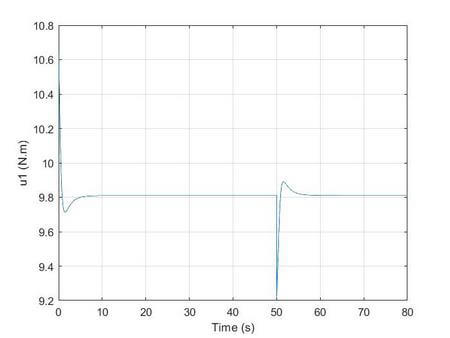
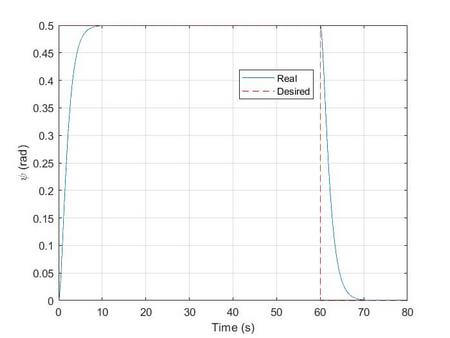
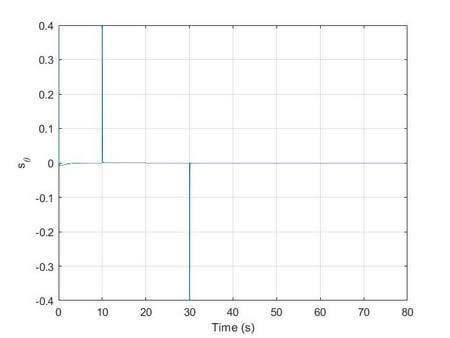
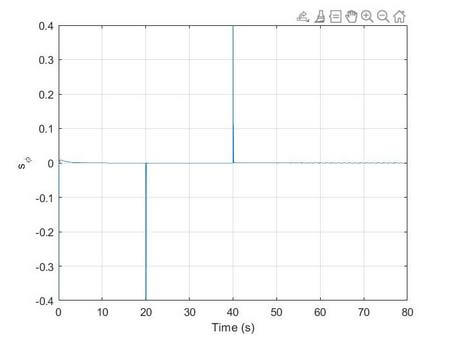
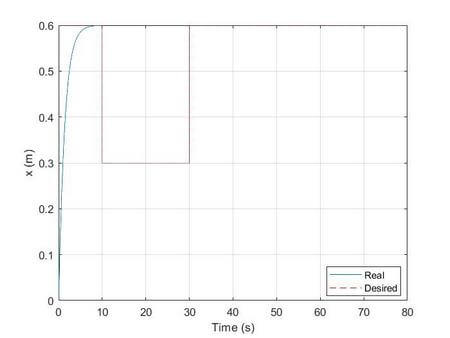
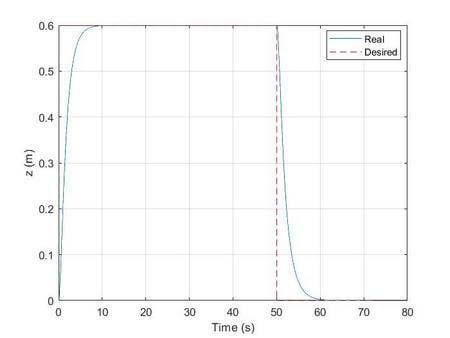
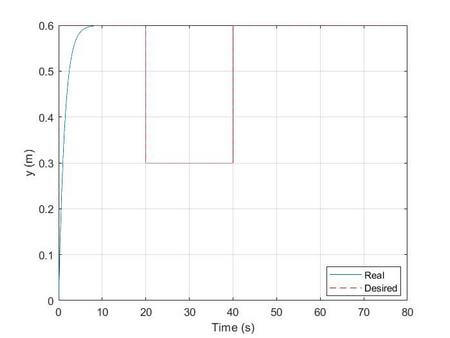
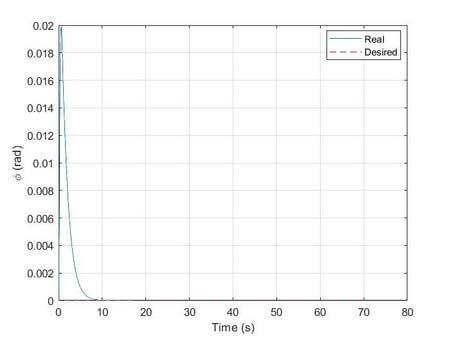
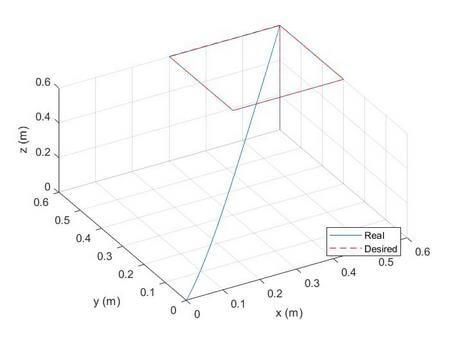
نتایج شبیه سازی بسیار زیاد هست از این رو یک نمونه از آن را در اینجا آورده ایم. نتایج مربوط به پوشه شماره 1 را در اینجا قرار داده ایم.
Neural network
Quadrotor
Neural network-based adaptive sliding mode control design for position and attitude control of a quadrotor UAV
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.