توضیحات
Multimodel Discrete Second Order Sliding Mode Control: Stability Analysis and Real Time Application on a Chemical Reactor
ترجمه فارسی موضوع مقاله: کنترل مد لغزشی مرتبه دوم گسسته چندمدلی: تحلیل پایداری و کاربرد زمانواقعی در یک راکتور شیمیایی
قسمتی از ترجمه مقاله:
- مقدمه
کنترل ساختار متغیر[1] اساسا با ویژگی مقاوم بودن در برابر عدم قطعیتهای مدل سیستم و اغتشاشات خارجی شناخته میشود.
سیستمهای مد لغزشی نوع خاصی از سیستمهای ساختار متغیر هستند.
این سیستمهای از نوع پسخورد (فیدبک) با بهره غیرپیوسته هستند که ساختار سیستم را با توجه به تغییر و تحول وضعیت سوئیچ میکنند تا مسیر حرکت را در زیرفضای از پیش تعیینشده، موسوم به سطح لغزشی، حفظ کنند.
با این حال، کاربرد این قانون کنترلی با یک سری مشکلات مواجه است.
در واقع، مد لغزشی نیازمند فرکانس سوئیچینگ بینهایت است اما به علت زمان محاسباتی و اینکه دینامیک حسگرها را نمیتوان نادیده گرفت، تحقق آن در کاربردهای عددی غیرممکن است.
در آن صورت، کنترل غیرپیوسته باعث ایجاد نوساناتی روی وضعیت و روی تابع سوئیچینگ میشود.
به علت مزایای زیاد راهبرد کنترل دیجیتال، گسستهسازی کنترل مد لغزشی[2] (SMC) به یک زمینه تحقیقاتی جالبی تبدیل شده است.
متاسفانه، پدیده چترینگ[3] در این مورد بسیار آشکار است، چون نرخ نمونهبرداری کاهش بیشتری دارد.
برای حل مشکل اخیر، روشهای گوناگونی پیشنهاد شده است.
اغلب این روشها کاهش دامنه نوسان به قیمت استحکام قانون کنترلی را ارائه میدهند.
در دهه هشتاد، یک تکنیک کنترلی جدید موسوم به کنترل مد لغزشی مرتبه بالا بررسی شد.
هدف این تکنیک این است که نه تنها تابع لغزش، بلکه انحرافات مرتبه بالای آن را نیز به صفر کاهش دهد.
در صورت کنترل مد لغزشی مرتبه r ، ناپیوستگی به مشتق کنترل اعمال میشود. کنترل موثر با بار انتگرالگیری بدست میآید و سپس میتواند به عنوان یک سیگنال پیوسته در نظر گرفته شود.
انجام پروژه متلب با متلبی
به عبارت دیگر، نوسانات تولید شده با کنترل غیرپیوسته، به مشتقات بالاتر تابع لغزش انتقال مییابند.
این روش باعث کاهش دامنه نوسانات شده و استحکام سیستمهای مد لغزشی همچنان دست نخورده باقی میماند.
از دیگر مشکلات کنترل مد لغزشی آسیبپذیر بودن آن در برابر اغتشاشات خارجی، تغییرات پارامتری و غیرخطی بودن بخصوص در طی reaching phase است.
بر اساس روش چندمدلی، راه حلی برای این مشکل توسط نویسندگان (میهوب و همکاران a2009) ارائه شد.
ترکیب روش چندمدلی و کنترل مد لغزشی گسسته مرتبه دوم (2-DSMC) هر دو مشکل چترینگ و آسیبپذیری در طی reaching phase را حل میکند.
تحلیل پایداری کنترل مد لغزشی مرتبه دوم گسسته چندمدلی (MM-2-DSMC) در این کار ارائه میشود.
از طریق مقایسه نتایج تجربی بر روی یک راکتیو شیمیایی DSMC (کنترل مد لغزشی گسسته) مرتبه اول، 2-DSMC (کنترل مد لغزشی گسسته مرتبه دوم) و MM-2-DSMC (کنترل مد لغزشی گسسته چندمدلی) ، عملکردهای روش مرتبه دوم و روش چندمدلی تشریح میشوند.
[1] Variable structure control
[2] Sliding Mode Control
[3] chattering
گزارش شبیه سازی با متلب :
شبیه سازی کنترل مد لغزشی مرتبه دوم گسسته چندمدلی
شکل 1 شبیه سازی سیستم در محیط سیمولینک را نشان می دهد.
کنترلر استفاده شده در این فایل کنترلر مدلغزشی برای سیستم گسسته می باشد که به صورت مرتبه اول در نظر گرفته شده است.
به دنبال ایده طراحی کنترلر و ایجاد مفهوم حساسیت کنترل مد لغزشی با در نظر گیری کرانی بر روی عدم قطعیت ها و اغتشاش سیستم سیگنال کنترلی را ایجاد خواهد نمود که نسبت به موارد یاد شده دارای مقاومت بالایی می باشد.
یکی ازمهمترین دلایل استفاده از کنترل مد لغزشی افزایش مقاومت سیستم در برابر عدم قطعیت ها می باشد.
استرم در کتاب کنترل تطبیقی خود با اشاره به این نکته که استفاده از سیگنال کنترل نوسانی (رله ای) باعث افزایش حاشیه پایداری سیستم می شود علت مقاومت مد لغزشی را استفاده از ترم سوییچبینگ در ساختار متغیر کنترلی بر می شمارد.
استفاده از کنترلر مدلغزشی علارغم همه مزیت ها منجر به پدیده وزووز (chattering) می شود.
علت اصلی اجتناب کردن از این پدیده وجود فرکانس های بالا موجود در سیگنال کنترل که متنابعها منجر به تحریک دینامیکهای مدل نشده سیستم می شوند که این خود نیز باعث افزودن عدم قطعیت سیستم خواهد شد.
( عدم قطعیت ها در دو دسته ساختاری و غیر ساختاری جای می گیرند، عدم قطعیت های ساختاری در فرکانس پایین سیستم موجود می باشد و عدم قطعیت های بالا در فرکانس های بالا ، واضح است که وجود سیگنال فرکانس بالا منجر به تحریک این نوع از عدم قطعیت ها خواهد شد)
در پی کاهش پدیده چترینگ ایده استفاده از سطح لغزش های مرتبه بالا مطرح شد که ما نیز در این مقاله درستی این ایده را اثبات نمودیم.
سطح لغزش مرتبه بالا به مفهوم مشتق گرفتن پیاپی از سطح لغزش S تا درجه مورد نظر (بسته به عملکرد مطلوب سیگنال کنترلی) می باشد.
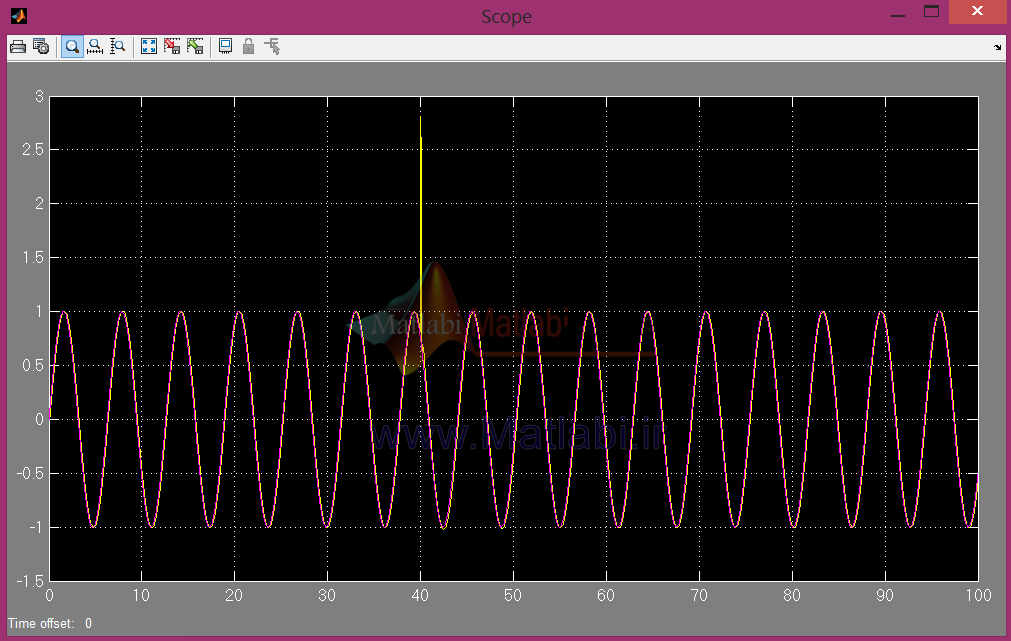
همانطور که در شکل 3 و 6 مشاهده می شود استفاده مد لغزشی مرتبه دوم باعث کاهش پدیده چترینگ در سیگنال کنترلی می باشد.
…
شکل 1 – کنترلر مد لغزشی مرتبه اول برای سیستم گسسته

شکل 2 – پاسخ سیستم با کنترلر مدلغزشی مرتبه اول

شکل 3 – سیگنال کنترلی کنترلر مد لغزشی مرتبه اول
…
شکل 4 – کنترلر مد لغزشی مرتبه دوم برای سیستم گسسته
شکل 5 – پاسخ سیستم با کنترلر مدلغزشی مرتبه دوم

شکل 6 – سیگنال کنترلی کنترلر مد لغزشی مرتبه دوم
روش های اولیه فضای حالت کاملا به مدل سیستم وابسته بودند.
این روش ها با اندکی تغییر در مدل سیستم یا پارامترهای آن و با حضور اغتشاشات یا نویز ، افت عملکرد شدیدی پیدا می نمودند و به سادگی ناپایدار می شدند.
به عبارت دیگر مقاومت آن ها در مواجه با خطاهای مدل سازی و دینامیک های مدل نشده یا نویز و اعتشاشات بسیار ضعیف بود.
به دنبال ضعف مطرح شده در ساختارهای فیدبک حالت خطی ، استفاده از کنترلرهای ساختار متغیر مانند مد لغزشی مطرح شده است.
که هدف آن ها رساندن سیستم به خطای صفر نمی باشد بلکه هدف رساندن سیستم روی سطح لغزش و نگه داشتن آن می باشد که این کار را نیز با استفاده از قابلیت فیدبک حالت ساختار متغیر انجام خواهد داد.
الگوریتم چند مدله از یک مجموعه مدل خطی شده سیستم متناسب با فاز عملیاتی استفاده می کند تا تمام دینامیک های محتمل سیستم را پوشش دهد .
یک کنترل کننده مرتبه بالا لغزشی به طور مجزا برای هر مدل شناسایی شده خطی در بانک مدل طراحی می شود.
در هر مرحله از شبیه سازی پاسخ واقعی سیستم با مدل های خطی شده که با ورودی کنترلی مشابهی تحریک می شوند ،مقایسه شده و تفاوت ها در پاسخ هر مدل نسبت به پاسخ سیستم واقعی برای تولید وزن سیگنال کنترلی متناسب با فاز عملیاتی سیستم استفاده می شود.
…
شکل 7 – کنترلر مد لغزشی ساختار متغیر مرتبه دوم برای سیستم گسسته

شکل 8 – پاسخ سیستم چند مدلی
شبیه سازی مقاله Multimodel Discrete Second Order Sliding Mode Control: Stability Analysis and Real Time Application on a Chemical Reactor
توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.