توضیحات
Modelling & Simulation for Optimal Control of Nonlinear Inverted Pendulum Dynamical System using PID Controller & LQR
ترجمه فارسی موضوع مقاله:
مدلسازی و شبیه سازی برای کنترل بهینه غیر خطی پاندول معکوس سیستم های دینامیکی با استفاده از PID کنترلر و LQR
گزارش شامل 11صفحه در قالب ورد است که قسمتی از آن در زیر آمده است.
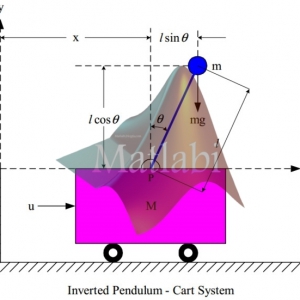
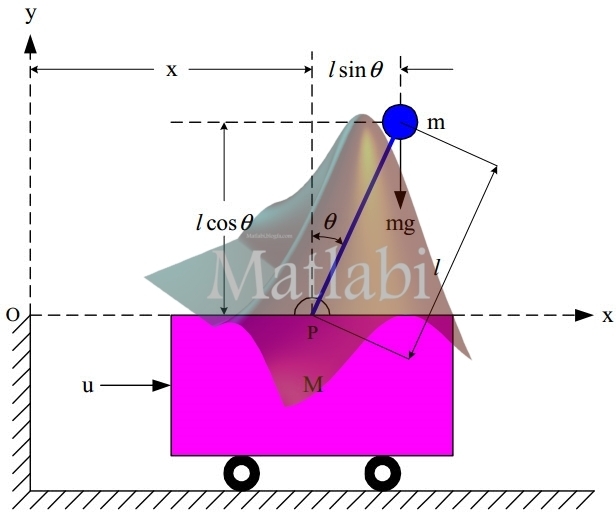
مدل غیر خطی آونگ معکوس
در این مسئله فرض شده است که میله پاندول دارای جرم ناچیز می باشد و اصطکاک وجود ندارد.
خطی سازی حول نقطه تعادل
خطی سازی به روش بسط سری تیلور، با توجه به معادله زیر در نقاط تعادل سیستم صورت می گیرد.
…
طراحی کنترلر PID
…
طراحی کنترلر LQR
…
نتایج بدست آمده از شبیه سازی با متلب :
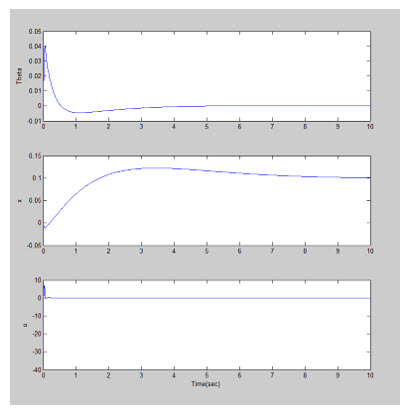
شکل 5 – خروجی و ورودی سیستم با کنترلر PID
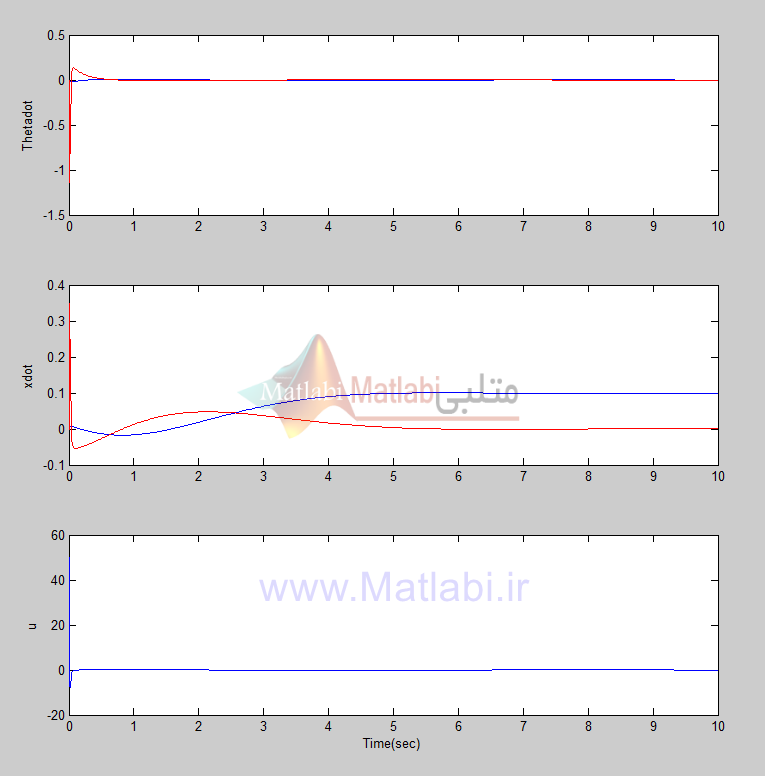
شکل 6 – خروجی و ورودی سیستم با کنترل LQR و یک PID
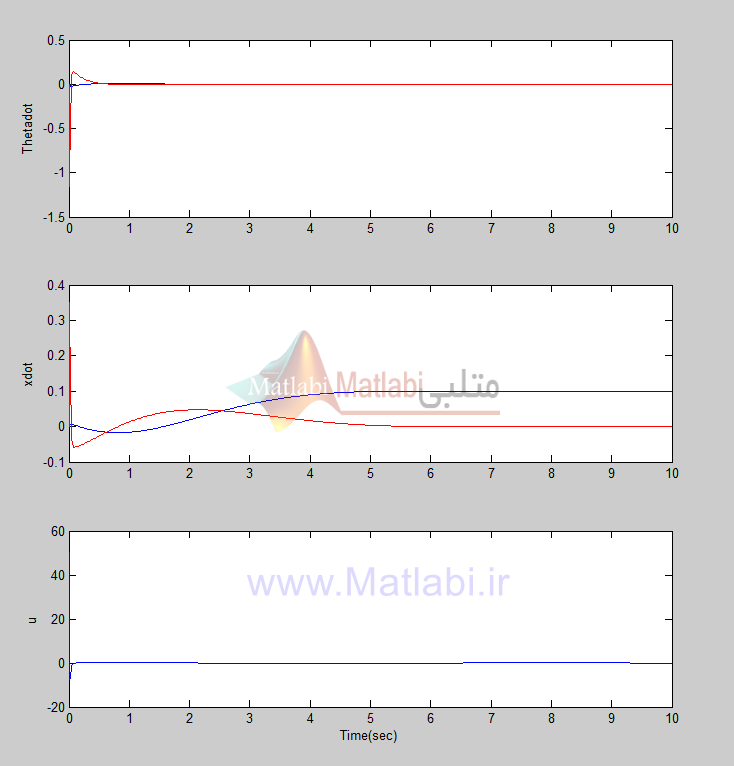
شکل 7 – خروجی و ورودی کنترلی سیستم با کنترل LQR و PID روی هردو خروجی
در این مقاله برای سیستم غیر خطی آونگ معکوس به طراحی کنترلر پرداختیم.
کلید واژه: کنترلر pid Inverted pendulum, nonlinear system, PID , control, optimal control, LQR
شبیه سازی مقاله
Modelling & Simulation for Optimal Control of Nonlinear Inverted Pendulum Dynamical System using PID Controller & LQR
به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.