توضیحات
Modeling and Control Design of Continuous Stirred Tank Reactor System
مدلسازی و کنترل سیستم رآکتور همزن دار پیوسته تانک
شبیه سازی در محیط ام فایل و سیمولینک متلب انجام شده است.
دارای گزارش ورد 7 صفحه ای است.
دارای ویدیوی توضیحات در مورد مقاله و شبیه سازی انجام شده 32دقیقه ای است.
دارای ترجمه مقاله در قالب ورد است.
محاسبات ضرایب کنترل کننده با استفاده از الگوریتم ژنتیک بهینه سازی شده است.
ترجمه مقاله
چکیده
سیستم رآکتور همزن دار پیوسته (cstr)یک سیستم رآکتور شیمیایی با ویژگیهای غیر خطی پیچیده است که در آن کنترل کارآمد غلظت محصول در cstr را می توان تنها از طریق مدل دقیق بدست آورد. مدل ریاضی سیستم استخراج شد. سپس مدل خطی از مدل غیر خطی بدست آمد. یک کنترلکننده PI معمولی و کنترلر PID برای رآکتور همزده پیوسته برای کنترل غلظت خطی پیشنهاد شدهاست. مطالعه شبیهسازی در SIMULINK انجام شدهاست. بهترین کنترلکننده با مقایسه معیارهای پاسخ مانند زمان نشست، زمان صعود، درصد اورشوت و خطای حالت ماندگار انتخاب شدهاست. از نتیجه شبیهسازی، کنترلر PID عملکرد بهتری نسبت به کنترلر PI معمولی دارد.
مقدمه
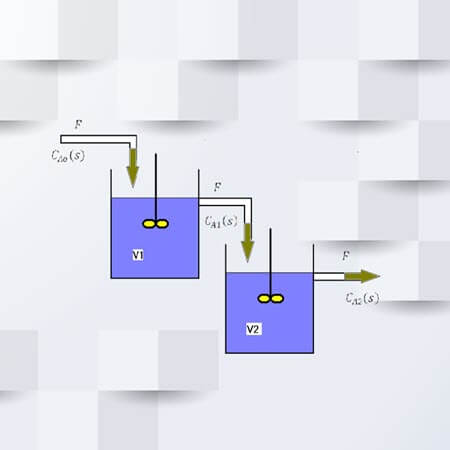
بهترین راه برای یادگیری در مورد سیستمهای کنترل، طراحی کنترلکننده، اعمال آن به سیستم و سپس مشاهده سیستم در عمل است. یک نمونه از سیستمهایی که از تئوری کنترل استفاده میکنند، سیستم رآکتور همزن دار پیوسته (cstr)است. این روش معمولا در بیشتر آزمایشگاههای کنترل فرآیند دانشگاهی یافت میشود که برای توضیح و آموزش مهندسی سیستم کنترل استفاده میشود. این روش عموما با مسائل کنترل واقعی مانند کارخانههای شیمیایی، تهیه پادزهرها در پزشکی و پردازش غذا مرتبط است. به طور گسترده مورد استفاده قرار میگیرد زیرا درک آن بسیار ساده است. با وجود این، روشهای کنترلی که میتوانند بسیاری از روشهای طراحی کلاسیک و مدرن را پوشش دهند، مورد بررسی قرار گیرند. سیستم رآکتور همزن دار پیوسته (cstr)یک سیستم رآکتور شیمیایی است که دارای ویژگیهای غیرخطی پیچیده است. این سیستم متشکل از دو تانک است که در شکل ۱ نشانداده شدهاست. غلظت جریان خروجی دو رآکتور شیمیایی، مجبور به داشتن یک واکنش مشخص خواهد بود. فرض بر این است که مخازن سرریز، رآکتورهای هم دمایی کاملا ترکیبی هستند، و چگالی در هر دو مخزن یکسان است. با توجه به فرضیات مخازن سرریز، حجمهای در دو تانک را می توان ثابت کرد و همه جریانها ثابت و برابر هستند. فرض بر این است که جریان ورودی ثابت است. از آن برای کنترل غلظت مخزن دوم مبتنی بر غلظت در مخزن اول استفاده می شود.
انجام پروژه متلب برق کنترل و انجام پروژه برق قدرت توسط متخصصین سایت متلبی با بهترین کیفیت و ارزان ترین قیمت قابل انجام است.
یکی از کنترلکنندههای معروف هم در حوزه کاربرد آکادمیک و هم در کاربرد صنعتی، کنترل گر PI و PID میباشد. آنها در مکانیزم حلقه فیدبک اعمال شدهاند و به طور گسترده در کنترل فرآیند صنعتی مورد استفاده قرار میگیرند. پیادهسازی آسان هر دو کنترلکننده، آن را در برنامههای کنترل سیستم قرار داد. این کنترلرها سعی بر اصلاح خطا بین خروجیهای اندازهگیری شده و خروجیهای مطلوب فرآیند به منظور بهبود پاسخهای حالت گذرا و پایدار تا حد ممکن دارند. از یک سو، به نظر میرسد که کنترلکننده PI عملکرد قابل قبولی در برخی از سیستمها داشته باشد، اما برخی اوقات تغییرات عملکردی در پارامترهای سیستم وجود دارند که به یک روش مبتنی بر وفقی برای رسیدن به پاسخ دقیقتر نیاز دارند. تحقیقات متعددی در دسترس هستند که با ترکیب روشهای انطباقی بر روی کنترلکننده PI، عملکرد آن را با توجه به تغییرات سیستم افزایش میدهند. محدودیتهای رویکردهای سنتی در برخورد با محدودیتها دلایل اصلی پیدایش روشهای قدرتمند و انعطافپذیر هستند. در این مقاله یک کنترلکننده PI و PID برای رآکتور دارای همزن پیوسته ناپایدار برای کنترل غلظت cstr خطی پیشنهاد شدهاست. عملکرد کنترلر PID با یک کنترلکننده PI معمولی با استفاده از Matlab Simulink مقایسه خواهد شد. در نهایت، وظیفه این مقاله طراحی و انتخاب بهترین کنترلکننده برای سیستمی است که بتواند غلظت cstr را کنترل کند.
توضیحات پروژه
شیوه حل مساله در مقاله:
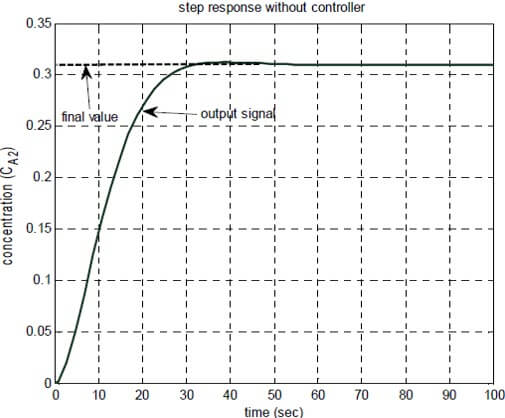
در ابتدا شبیه سازی با تابع تبدیل اصلی و فیدبک 1 صورت گرفت و نتیجه به فرم زیر بدست آمد که دارای ستلینگ تایم و رایز تایم بسیار نامناسب می باشد. علاوه بر این خطای آن نیز بسیار زیاد است.
![]()
سپس با استفاده از روش زیکلر-نیکولز به محاسبه ضرایب P و I برای کنترل کننده PI پرداخته شد و نتایج به صورت زیر بدست آمد.
تمام این مراحل برای کنترل کننده PID محاسبه شد و نمودار خروجی بدست آمد که نتایج نسبت به PI بهتر بوده است.
- ضرایب PID مقاله
Kp=4.5 , Ki=0.3 , Kd=10
- ضرایب PI مقاله
Kp=5 . Ki=0.25
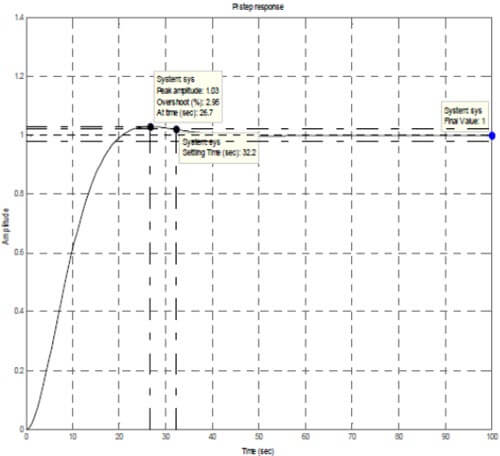
نتایج مقاله با کنترل کننده PI
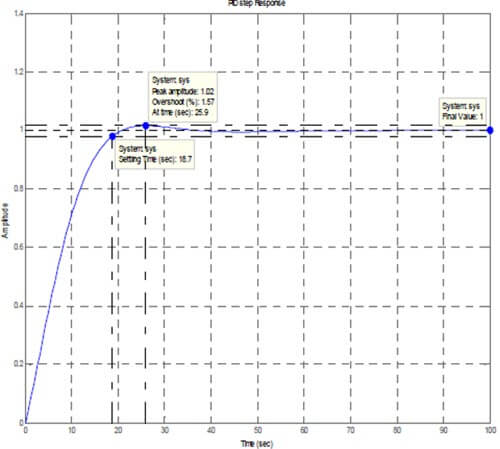
نتایج مقاله با کنترل کننده PID
نتایج بدست آمده از شبیه سازی با متلب
محاسبه پارامترهای PI و PID با استفاده از الگوریتم ژنتیک
در اینجا محاسبات ضرایب کنترل کننده با استفاده از الگوریتم ژنتیک بهینه سازی می شود
کنترل کننده PID
نتایج مربوطه به شکل زیر است.

منحنی های تابع تبدیل با فیدبک 1 و تابع تبدیل با کنترل کننده PID

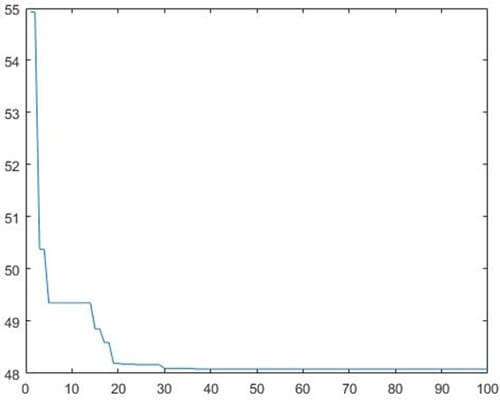
روند بهینه سازی با 100 تکرار جهت محاسبه ضرایب PID به کمک الگوریتم ژنتیک
پارامترهای کنترل کننده PID به صورت زیر از الگوریتم بدست آمدند.
Kp =
3.7051
Ki =
0.2722
Kd =
9.9938
مقادیر OverShoot و Settling Time بدست آمده برای کنترل کننده PID به شرح زیر است.
Overshoot=2.19;
SettlingTime=21.42;
کنترل کننده PI

منحنی های تابع تبدیل با فیدبک 1 و تابع تبدیل با کنترل کننده PI
روند بهینه سازی با 100 تکرار جهت محاسبه ضرایب PI به کمک الگوریتم ژنتیک
Kp =
2.9966
Ki =
0.2097
مقادیر OverShoot و Settling Time بدست آمده برای کنترل کننده PI به شرح زیر است.
Overshoot=2;
SettlingTime=24.43;
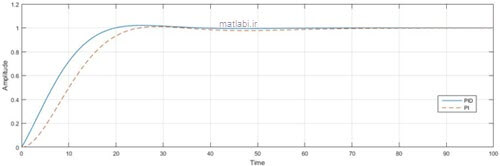
منحنی های PI و PID با نتایج بدست آمده از الگوریتم ژنتیک
همانطور که در تصویر فوق مشاهده می شود کنترل کننده PID نتایج بهتری نسبت به الگوریتم PI دارد و مشخصه های Settling Time و Rise Time بهتری دارد.
ترجمه نتیجه گیری مقاله
در پایان، این پروژه با موفقیت انجام شد که در آن دو کنترلکننده طراحی شدهاند و اهداف دیگر این پروژه به دست آمدهاند. یک مدل برای یک سیستم cstr با موفقیت طراحی و توسعه داده شدهاست. با این دو نوع کنترلکننده، بهترین کنترلکننده باید تعیین شود. آن براساس معیارهایی چون زمان نشست کوچک و زمان صعود انتخاب میشود، هیچ خطای حالت پایدار ندارد و هیچ overshoot ندارد. از آنجا که این معیارها را نمی توان در یک زمان به دست آورد، ضروری است که تصمیم بگیریم کدام معیار را بیشتر میخواهیم. برای سیستم cstr، بیشترین معیارمورد نیاز این است که سیستم فاقد overshoot و خطای حالت پایدار صفر است. بین این کنترلکنندهها مقایسه انجام شدهاست که کدام کنترلکننده میتواند با معیار مطابقت داشته باشد. از نتیجه و بخش بحث، دو کنترلکننده با موفقیت طراحی شدند. پاسخ هر کنترلکننده در یک پنجره رسم شده همانطور که در شکلهای ۷ و ۸ نشانداده شدهاست. نتایج شبیهسازی نشان میدهد که کنترلر PID، بهترین عملکرد را دارد، زیرا در کمترین زمان خطای حالت پایدار صفر دارد. زمان کوتاهی طول میکشد تا به حالت پایدار برسد. علاوه بر این، کمتر overshoot دارد. از این رو، می توان نتیجه گرفت که بین کنترلکننده PI و کنترلر PID، بهترین کنترلکننده برای سیستم رآکتور stirred پیوسته (cstr)کنترلر PID میباشد.
کلیدواژه:
Dynamic modeling, PI and PID controllers, Stirred tank system, Matlab and Simulink
مدلسازی دینامیک, کنترلکنندههای PI و PID, سیستم مخزن همزن دار, Matlab و Simulink
شبیه سازی
Modeling and Control Design of Continuous Stirred Tank Reactor System
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.