توضیحات
Modeling and Adaptive Control of a Quadrotor
مدلسازی و کنترل تطبیقی کوادروتور
کوادرتور چیست؟

کوادرتور یا کوادروکوپتر یا پرنده چهار ملخه نوعی عمودپرواز است که بخاطر استفاده از چهار ملخ بصورت صلیبی این لقب را به ان داده اند.
این نوع پیکربندی به پرنده این امکان را میدهد تا پرنده بتواند به راحتی و بطور مساوی در تمامی جهات حرکت کند و قدرت مانور فوق العاده ای داشته باشد.
اما این پرنده بر خلاف ظاهر ساده خود بسیار بسیار پیچیده است بطوری که طراحی این نوع از پرنده ها در کشورهای محدودی انجام میگیرد و در کشور ما ایران فقط دانشگاه قزوین توانسته تا حدودی به این فناوری دست پیدا کند .

اما مشکل بزرگی که بر سر طراحی همچین پرنده هایی وجود دارد مسئله پایداری این نوع از پرنده هاست که کار بسیار پیچیده ای است .
در زیر به برخی از مشکلاتی که ممکن است تعادل پرنده را برهم بزند خواهیم پرداخت:
1-تغییر دور ناخواسته پره ها و عدم تعادل در سرعت چرخش پره ها:
این امر ممکن است بخاطر عوامل زیاد و گوناگونی اتفاق بیفتد ازجمله اصطکاک متفاوت موتورها بخاطر کثیفی موتورها یا همدور نبودن خود موتورها یا عدم همخوانی استپهای کنترل دور یا مسائلی از این دست میباشد.
2-عدم تعادل وزنی پرنده:
این مسئله که بسیار شایع است ممکن است بخاطر عواملی چون تغییر مرکز ثقل و یا نصب نامتقارن تجهیزات اصلی و یا فرعی مانند دوربینها و سنسورها و یا عوامل خارجی دیگر رخ دهد
3-اما مهمترین مسئله در عدم پایداری باد است:
باد به تنهای میتواند تعادل تمامی پرنده ها را برهم بزند و کوادرتور هم جدا از این مسئله نیست.
اما بادها جور دیگری هم خودنمایی میکنند و ان تاثیر باد ناشی از خود ملخها که شامل جریان گردابی ملخها و جریان برگشتی از سطح زمین میشود که بصورت نامتعادل به خود پره ها و بدنه پرنده برخورد کرده و بشدت تعادل پرنده را برهم میزند.
اما اثر مشکل عدم تعادل به این گونه است که اگر پرنده به هر دلیلی از دلایل فوق 1درجه و شاید هم کمتر از تعادل خارج شود بردار رانش موتورها از حالت عمود خارج شده و پرنده به صورت ناخواستا به یک سمت حرکت میکند که این امر با ازدیاد زاویه ناپایداری سرعت بیشتری میگیرد به طوری که باعث برخورد ناخواسته و عدم ثابت ایستادن پرنده میشود و در نهایت منجر به سقوط و انهدام پرنده میشود.
کوادرتور از چهار ملخ که دو به دو بر خلاف جهت هم میگردند تشکیل شده است.
یعنی به این صورت که دو ملخ روبروی هم به صورت همجهت به یک سمت میچرخد و دو ملخ هم به صورت همجهت بوده و در خلاف جهت جفت ملخ اول میچرخد.
اما نحوه کنترل حرکت کوادرتورها به صورت زیر است:
برای حرکت پرنده در محور عمود باید دور جفت ملخهای یک جهت کم و به همون مقدار دور جفت ملخ جهت مخالف افزوده شود.
این کار باعث میشود که بدون تغییر ارتفاع نیروی عکس العمل یک سمت از سمت دیگر بیشتر بشود و در نتیجه پرنده در یک سمت حول محور عمودی بچرخد
اما برای حرکت پرنده حول محور عرضی و طولی لازمه بین دو ملخ همجهت یک تفاضل دور به وجود بیاریم.
به این ترتیب یک سمت پرنده به سمت بالا رفته و طرف دیگر به سمت پایین میل پیدا میکند که این امر باعث کچ شدن بردار رانش و حرکت پرنده به سمتی که بازویش پایین تر است میشود و هر چه مقدار این انحراف بیشتر باشد سرعت پرنده نیز بیشتر میشود.
برای تغییر ارتفاع هم فقط کافی است سرعت هر ۴ ملخ را با هم کم یا زیاد کنیم
موتور : اکثر کوادروهای پیشرفته از موتورهای بدون جاروبک برای حرکت استفاده میکنند.
این نوع موتور ها بسیار کوچک- سبک و پرقدرتند.
دلیل این امر هم این است که بخاطر عدم وجود جاروبک یا همان زغال در این نوع موتورها هم اصطکاک بسیار کم بوده و هم میتوان توان و جریان بالایی را به موتور اعمال کرد.
اسپید کنترل:
یا همان راه انداز موتور براشلس :در موتورهای بدون جاروبک بخاطر عدم وجود جاروبک عمل کموتاسیون وتغییر قطبها و در نهایت چرخش موتور بصورت مصنوعی و توسط اسپید کنترل یا درایو موتور بدون جاروبک انجام میشود.
اصول کلی کارکرد این قطعه بر اساس تولید نوسان که برق مستقیم را به صورت متناوب در میاورد نیز میباشد.
در انتخاب درایو باید دقت بسیاری شود که تعداد استپهای پیشبینی شده در درایو هر چه بیشتر باشد پرنده پروازی نرمتر و پایدارتری را به نمایش خواهد گذاشت.
ملخ : در انتخاب ملخ دو فاکتور از بقیه پر اهمیت تر است و آن دو طول و گام ملخ است که معمولا به اینچ و به صورت پیوسته بروی ملخ نوشته میشود.
برای مثال ملخ ۶*۸ ملخی است با طول ۸ اینچ و گام ۶ اینچ. گام یا همان میزان پیشروی به میزان پیشروی ملخ در هر دور در واحد اینچ نیز اطلاق میشود.
البته ملخها از منظر نوع موادی که در ساخت ان به کار رفته هم به چند دسته تقسیم بندی میشوند که از ان جمله میتوان به ملخهای چوبی – پلاستیکی و مواد مرکب یا کربنی نیز اشاره کرد.
باطری : شاید دغدغه اصلی سازندگان وسایل پرنده الکتریکی تامین انرژی این نوع از پرنده هاست.
شاید در گذشته ای نه چندان دور این امر تا حدودی غیر ممکن مینمود اما با ورود و عرضه باطریهای لیتیوم پلیمر یا همان لیپو دنیای پرنده های الکتریکی وارد مرحله جدیدی از زندگی خویش شد.
چون باطریهای لیپو با دارا بودن وزن کم – قدرت زیاد و قدرت تخلیه جریان بسیار بالا میزان ساعت پروازی به مراتب بالاتری را به پرنده های الکتریکی میدهند.
شاسی یا بدنه : اما اخرین قسمت بدنه پرنده است که میتوان از بیشتر مواد سبک وزن در ساخت ان استفاده کرد اما در پرنده های حرفه ای تا نیمه حرفه ای اکثرا از الیاف کربن برای ساخت بدنه کوادروتورها استفاده میشود چون الیاف کربن با دارا بودن مقاومت بسیار بالا وزن بسیار کمی را به خود اختصاص میدهند.
1 .کنترل وضعیت کوادروتور توسط کنترل تطبیقی
معادلات حرکت کوادروتور
اگرچه که کوادروتور یک وسیله شش درجه آزادی است، ولی تنها دارای چهار پره میباشد، از اینرو ممکن نیست که در همه درجات آزادی به set-point مطلوب برسد و تنها در بیشترین حالت در چهار درجــــه آزادی بهset-point مطلوب خواهد رسید.
به خاطر ساختار خوب کوادروتور، انتخاب چهار متغیر کنترل پذیر و جداسازی آنها بسیار آسان است، و سبب میشود کنترل کوادروتور آسانتر شود. چهار حرکت اصلی که اجازه میدهد کوادروتور به ارتفاع و حالت مورد نظر برسد، به صورت زیر است:
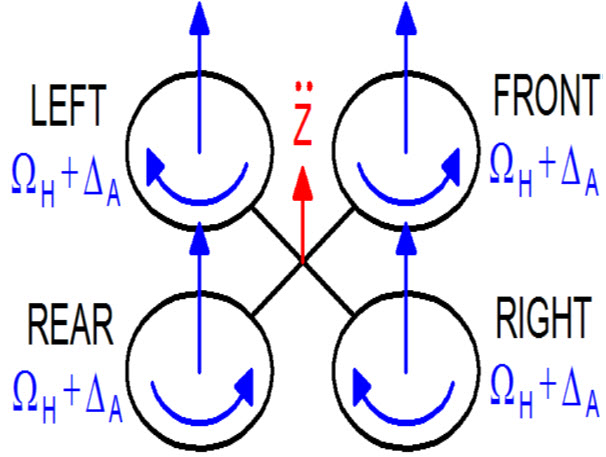
1-نحوه حرکت کوادروتور در راستای محور Z
این فرمان با افزایش یا کاهش سرعت همه روتورها به یک اندازه به وجود میآید.
این امر سبب وارد شدن یک نیروی عمودی جهت بالا رفتن و پایین آمدن کوادروتور میشود.
اگر کوادروتور در حالت افقی باشد جهت عمودی دستگاه اینرسی و دستگاه بدنی در یک راستا قرار خواهد گرفت در غیر این صورت این نیروی تراست ایجادشده، سبب تولید شتاب در راستای افقی و عمودی میشود. ، فرمان تروتل را نشان میدهد.
رنگ آبی سرعت زاویهای روتورها را مشخص میکند که برابر H +ΔA برای هر روتور است.
ΔA مقدار مثبت اضافهشده به روتور است و نمیتواند بسیار بزرگ باشد زیرا مدل در نهایت تحت تأثیر غیرخطیها و saturation قرار میگیرد.
2-نحوه حرکت رول کوادروتور
رول : (U2) این فرمان با افزایش (یا کاهش) سرعت روتور چپ و کاهش (یا افزایش) سرعت روتور راست انجام میشود.
این کار سبب ایجاد گشتاوری حول محور xB شده و کوادروتور را میچرخاند.
مقدار تراست عمودی ثابت مانده و برابر همان مقداری است که هنگام هاور کردن تولید شده بود، بنابراین این فرمان تنها منجر به شتاب زاویهای رول میشود.
مقادیر مثبت ΔA و ΔB به گونهای انتخاب میشوند که مقدار تراست عمودی تغییر نکند.
میتوان ثابت کرد که به ازای مقادیر کوچک رول بسیار بزرگی به کوادروتور وارد کنیم زیرا باعث میشود مدل در نهایت تحت تأثیر غیرخطیها و saturation قرار بگیرد.
ΔA داریم ΔB ≈ ΔA. همانند حالت قبلی نمیتوانیم
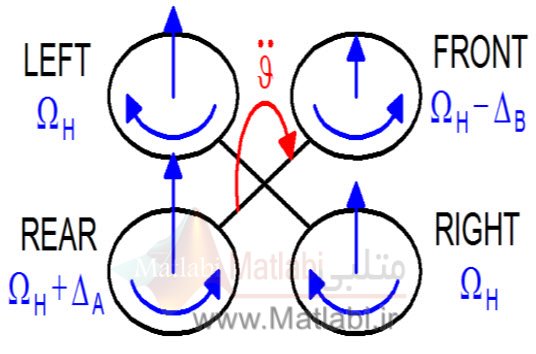
3-نحوه حرکت پیچ کوادروتور
پیچ : (U3) این فرمان شباهت زیادی به فرمان رول دارد و با افزایش (یا کاهش) سرعت روتور جلویی و با کاهش (یا افزایش) سرعت روتور عقبی اتفاق میافتد، این امر سبب تولید گشتاوری حول محور yB شده که کوادروتور را میچرخاند و مقدار تراست عمودی برابر مقدار هاور، ثابت باقی میماند در نتیجه این فرمان تنها سبب ایجاد شتاب زاویهای پیچ در وسیله میشود.
همانطور که در تصویر 4 مشاهده میشود، مانند نمونه قبل ΔA و ΔB به گونهای انتخاب می¬شوند که تراست عمودی بدون تغییر باقی بماند و زیاد بزرگ نباشند.
به ازای مقادیر کوچک داریم ΔB ≈ ΔA .
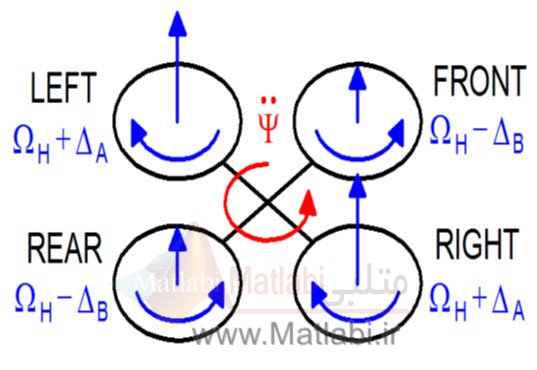
4-نحوه حرکت یاو کوادروتور
یاو : (U4) این فرمان با افزایش (یا کاهش) سرعت روتور جلویی و عقبی و کاهش (یا افزایش) سرعت روتور چپ و راست به طور همزمان اتفاق میافتد.
این امر سبب اعمال گشتاوری حول zB به کوادروتور شده که باعث چرخش وسیله میشود.
تراست عمودی همان مقدار ثابت هاور کردن را دارد در نتیجه این فرمان تنها سبب پیدایش شتاب زاویهای یاو، در کوادروتور میشودΔA و ΔB بگونهای انتخاب میشوند که تراست عمودی بدون تغییر باقی بماند و زیاد بزرگ نباشند و به ازای مقادیر کوچک داریم .ΔB ≈ ΔA
همانطور که میدانید xو y و zموقعیت مرکزجرم کوادروتور نسبت به دستگاه اینرسی هستند و و و زوایای اویلر بوده که بیانگر وضعیت و جهتگیری وسیله پرنده نسبت به دستگاه مختصات اینرسی میباشند.
m جرم و Ixx و Iyyو Izz ممانهای اینرسی کوادروتور بوده و Jr و r به ترتیب ممان اینرسی و سرعت زاویهای پرههای روتور هستند.
U1 و U2 و U3 و U4 ورودیهای کنترلی برای تغییر ارتفاع و زوایای رول و پیچ و یاو هستند.
برای استخراج معادلات دینامیکی شش درجه آزادی حرکت کوادروتور از قوانین نیوتن و اولر در دستگاه بدنی استفاده میشود.
| (0‑1) |
FB = m + B × mVB |
| (0‑2) | MB = I + B × mB |
گشتاور نیروهای آیرودینامیکی حول شفت موتور و ها
نیروهای آیرودینامیکی که به پرهها وارد میشوند سبب تولید گشتاور حول شفت[N.m] Qو تولید گشتاور حول هاب [N.m] (R , P) میشوند.
| (0‑3) |
Q = CQ A ( Rrad )2 R ( θ0– λ) – = (1 + 2 ) + λ |
| (0‑4) |
(-1)i = = – Q1 + Q2 – Q3 + Q4 |
میتوان گشتاور Q را برابر با d2 فرض کرد. ب
ه دلیل یکسان نبودن توزیع نیروی تراست در سرتاسر پره، گشتاورهای رول و پیچ حول هاب تولید میشوند، که گشتاور رول برابر است با :
| (0‑5) |
R = CR A ( Rrad )2 Rrad = – ( θ0 – – λ) |
| (0‑6) | (-1)i+1 = = R1 – R2 + R3 – R4 |
و گشتاور پیچ تولید شده برابر صفر است (P=0,Cp=0).
گشتاور نیروی هاب حول مرکز جرم
نیروی هاب به دو نیروی در راستای محورx و y تقسیم شد که از نیروی در راستای y به دلیل کوچک بودن صرفنظر میشود.
اگر فاصله صفحه محل اثر نیرو تا مرکز جرم کوادروتور را h در نظر بگیریم، گشتاوری حول محور y دستگاه بدنی به وجود میآید:
| (0‑7) | … |
همچنین نیروی هاب موتورهای 2 و 4 باعث گشتاوری حول محور z دستگاه بدنی میشوند :
| (0‑8) | … |
معادلات دینامیکی حرکت چرخشی کوادروتور را در دستگاه بدنی بصورت زیر میباشد :
| (0‑9) | … |
Ixx = (Iyy -Izz) – Jrr + U2
Iyy = (Izz –Ixx) + Jrr + U3
Izz = (Ixx –Iyy) + Jr r +U4
m = -(cos sin cos + sin sin) U1
m = -(cos sin sin – sin cos)U1
m = mg – (cos cos)U1
ترمهایJrr وJrr و Jr r مبین گشتاور ناشی از اثرات ژایروسکوپیک پرهها میباشند.
در مقایسه با سایر گشتاورهای وارد بر کوادروتور، این اثرات ژایروسکوپیک نقشی در وضعیت و جهتگیری کوادروتور ندارند و تنها برای افزایش دقت و بدست آوردن مدل کاملتری از کوادروتور در معادلات آورده شدهاند، لذا در شبیهسازی و حصول سیستم کنترلی نقشی نخواهند داشت.
با این کار از پیچدگی کلی سیستم کاسته خواهد شد.
از طرفی از آنجا که هدف در این قسمت از گزارش شبیهسازی و کنترل کوادروتور در شرایط هاور میباشد، لذا سرعت زاویهای کوادروتور حول محورهای دستگاه مرجع اینرسی کوچک بوده به همین دلیل میتوان از اثرات ژایروسکوپیک صرفنظر کرد.
در معادلات اخیر مقادیر کنترلی از ترکیب سرعت زاویهای روتور ها بوجود میآیند :
…
خطی سازی معادلات حالات غیرخطی
روشی که برای خطیسازی استفاده میکنیم بسط سری تیلور است.
معادلات حاکم غیرخطی هستند و باید حول شرایط پروازی پایدار هاور خطی شوند.
عمل خطیسازی با استفاده از ژاکوبین معادلات غیرخطی نسب به تمام متغیرهای حالت حول نقطه کاری هاور X0 و U0 انجام میشود.
(U0 = [ mg 0 0 0] , X0 = [0 0 0 0 0 0 0 0 0 0 0 0 0])
هدف این قسمت از پروژه شبیهسازی شرایط پروازی هاور در غیاب عدم قطعیتها و اغتشاشات است.
با استفاده از نرمافزار متلب و تابع ode45 به حل معادلات دیفرانسیل رفتار کوادروتور با شرایط اولیه صفر میپردازیم.
سرعت زاویهای هر روتور از ابتدا ثابت و برابر سرعت زاویهای تعادل است که به روش زیر محاسبه میشود(کدهای مربوط به شبیهسازی در ضمیمه C آمده است) :
شرایط اولیه :
X0 = [0 0 0 0 0 0 0 0 0 0 0 0]
→ 4b = mg → 0 =
با استفاده از بسط تیلور و خطیسازی حول شرایط تعادل پروازی هاور داریم:
Ixx = U2
Iyy U3
Izz U4
m = g
m = g
m = mg -U1
همانطور که مشاهده میکنید سیستم چند ورودی –چند خروجی کاملاً از هم دیکوپله شدهاند.
با لاپلاس گرفتن از طرفین معادلات اخیر فرم جدیدی از معالدات دست پیدا خواهیم نمود.
حال که معادلات را به فرم تابع تبدیل مرتبه دوم داریم میتوانیم از روشهای گفته شده در کتاب منترل تطبیقی غیرخی کاربردی اسلوتین استفاده کنیم.
کنترل تطبیقی مستقیم(direct adaptive control)
برای کنترل وضعیت کوادروتور از روش کنترل تطبیقی مدل مرجع مطابق با قسمت 8.3 کتاب اسلوتین عمل خواهیم کرد.
نتایج شبیه سازیها و نمودار سیمولینکی طراحی شده در ادامه نشان داده شده است.
نمودار اول و دوم مقادیر زوایای رول و پیچ و یا هستند که بخوبی مقادیر مرجع ثابت صفر و سینوسی را تعقیب نمودهاند.
ونمودار سوم و چهارم تخمین پارامترهای ثابت سیستم میباشند.
…
شکل 0‑5 : بلوک دیاگرام کنترل تطبیقی مدل مرجع

شکل 0‑6 : زوایای رول و پیچ و یاو به هنکام تعقیب فرمان ورودی سینوسی
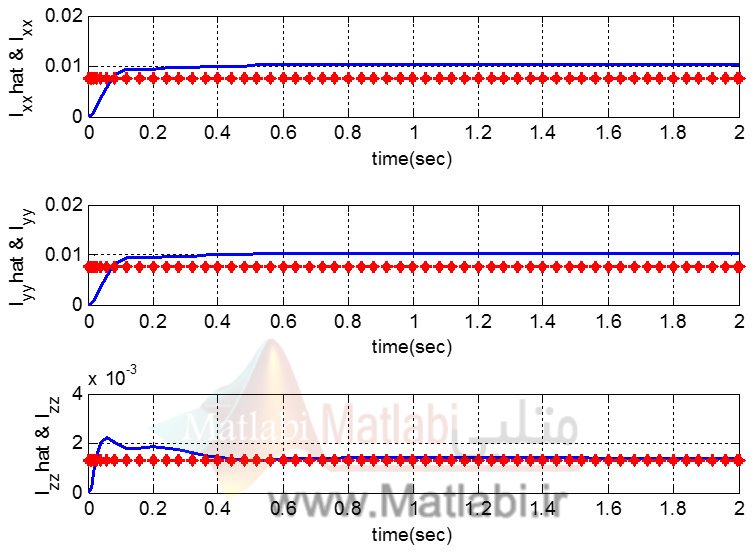
شکل 0‑7 : تخمین پارامترهای ممان اینرسی به هنگام ورود مرجع سینوسی
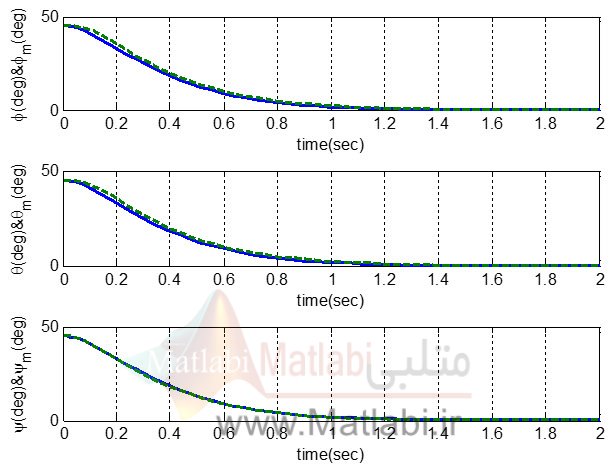
شکل 0‑8 : زوایای رول و پیچ و یاو به هنگام پایدار سازی از زاویه 45 درجه و رسیدن صفر
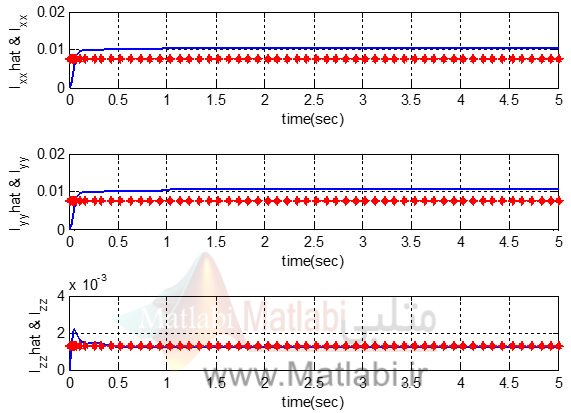
شکل 0‑9: پارامترهای تخمین زده شده به هنگام ورودی مرجع صفر
در نمودارهایی که نشان دهنده زوایای معرف وضعیت هستند خطوط تیره نشاندهئده پاسخ مدل مرجع به سیگنال ورودی بوده و خطوط کامل نشان دهنده پاسخ سیستم تحت کنترل تطبیقی بوده بخوبی مشاهده میشود که خروجی پلنت بخوبی مدل مرجع را تعقیب کرده و خطای ماندگار را به صفر میرساند.
تمام متن گزارشکار در توضیحات فوق آمده است.
فقط بعضی فرمول ها و تصاویر در این صفحه درج نشده است.
کلید واژه :,شبیه سازی با متلب ,پروژه های اماده متلب, matlab,matlab project,پروژه متلب,
UAV, VTOL, quadrotor, adaptive control, identification, stabilization
شبیه سازی Modeling and Adaptive Control of a Quadrotor به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.