توضیحات
مدل کنترل پیش بین برای ربات سایز کوچک همه جهته با محدودیت موتور و عدم لغزش
عنوان اصلی مقاله:
Model Predictive Control for Omnidirectional Small Size Robot with Motor and Non-Slipping Constraints
شبیه سازی در محیط ام فایل متلب انجام شده است. قابل اجرا با متلب 2018 به بالا
دارای گزارش ورد 5 صفحه ای ورد است. (دارای گزارش کاملتر از شبیه سازی در قالب Pdf است)
توضیح پروژه کنترل پیش بین برای ربات
در این مقاله به کنترل پیش بین ربات همه جهته با محدودیتهای مورد نظر پرداخته شده است و نتایج قابل قبولی نیز بدست آمده است.
شبیه سازی شامل سه فایل فایل است:
فایل Main.m که در آن سناريو های مختلف شبيه سازی پياده سازی شده و نتايج شبيه سازی را ترسيم مي کند.
فايل MPCcost.m که تابع هزينه رابطه 32 مقاله را پياده سازی مي کند.
فايل MPCconstaint.m که محدودیت رابطه 33 که از روابط 22و27و28 است را پیاده سازی می کند.
برای دیدن نتایج شبیه سازی کافیست فایل Main.m اجرا شود.
در زیر نتایج شبیه سازی با متلب برای پروژه کنترل پیش بین ربات همه جهته را آورده ایم:
نتایج بدست آمده شامل شکل های 4 تا 7 مقاله می باشد.
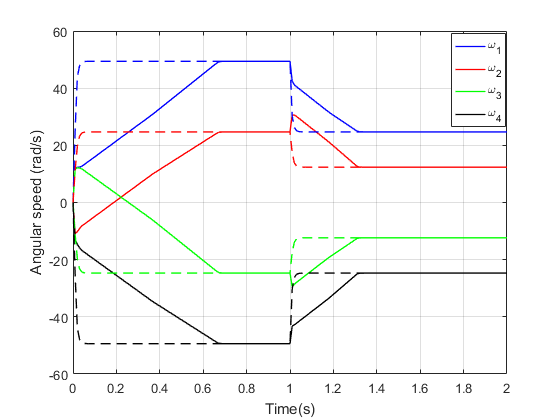
شکل 4. سرعت زاویه ای کنترل شده

شکل 5. ولتاژ اعمال شده به پایانه های موتور. رنگ سرخابی نشان دهنده محدودیت های ولتاژ است.
در شکل های 6 و 7 شبیه سازی با ورود اغتشاش انجام شده است:
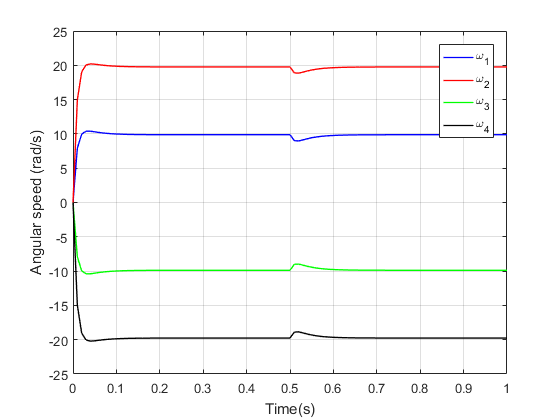
شکل 6. سرعت زاویه ای کنترل می شود.
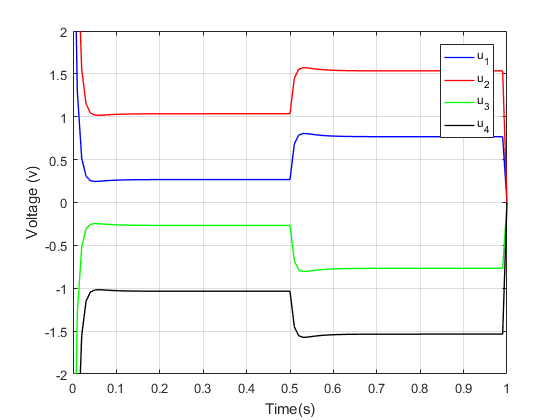
شکل 7. ولتاژ اعمال شده به پایانه های موتور.
در شکل 7 کمی تفاوت با شکل 7مقاله وجود دارد که علت آن نبود پارامترهای پارامترهای h و Iz در مقاله است که به صورت آزمون و خطا توسط برنامه نویس درج شده اند.
در این مقاله یک مدل خطی برای ربات ها و محدودیت های فیزیکی آن وجود دارد. این نسخه خطی مدل، سنگ بنای پیاده سازی MPC های کلاسیک خطی است. MPC های خطی به دلیل کاهش هزینه محاسباتی در مسائل بلادرنگ امکان پذیرتر هستند. اگرچه نتایج نشان میدهد که در صورت وجود محدودیتها، عملکرد کنترلکننده کاهش مییابد، اما شرایط عدم لغزش در نظر گرفته میشود. این شرایط برای برنامه ریزی مسیر مهم هستند، زیرا استراتژی ربات می تواند به ربات دستور دهد تا به یک موقعیت خاص برود و از برخورد با مانع در طول مسیر جلوگیری کند.
لغزش ها می تواند باعث شود ربات از مسیر برنامه ریزی شده خارج شود.
شاید به موارد زیر نیز علاقه مند باشید:
- استراتژی کنترل جدید برای تبدیل دو جهته DC-DC در خودرو برقی
- کنترلر مود لغزشی پایانه فازی تطبیقی MIMO برای دستکاری کننده های رباتیک
- یک کنترلر پیش بین مدل تثبیت کننده برای تنظیم ولتاژ مبدل بوست DC/DC
- استراتژی جدید کنترل برای مبدل دو جهته DC-DC در خودروهای الکتریکی
- طراحی و شبیه سازی کنترل کننده فازی برای سیستم ترمز ضد قفل فازی
کلیدواژه:
کنترل پیش بین, ربات همه جهته, محدودیت بدون لغزش, موبایل ربات
کنترل پیش بین برای ربات سایز کوچک همه جهته با محدودیت موتور و عدم لغزش با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.