توضیحات
تنظیم MIMO PID برای سیستمهای فاز غیرمینیمم: تعیین محدودیتهای قابل دستیابی برای یک رفتار پایدار
عنوان اصلی مقاله:
MIMO PID tuning for nonminimum phase systems: setting attainable limits for a stable behaviour
شبیه سازی در محیط ام فایل متلب انجام شده است.
دارای گزارش مختصر ورد است.
چکیده مقاله:
سیستمهای فاز غیرحداقل در بسیاری از فرآیندهای صنعتی ارائه میشوند که مشکلاتی را در طرح کنترل آنها به همراه دارد.
در این مقاله ما روشی را برای تنظیم کنترلکنندههای چند ورودی-چند خروجی متناسب-انتگرال-مشتق پیشنهاد میکنیم که به این ویژگی میپردازد.
طراحی کنترلکنندهای که در اینجا به کار میرود مبتنی بر تعیین مسیر قابل دستیابی، برای سیستم فاز غیرمینیمم است که معیارهای عملکرد و استحکام را در نظر میگیرد.
بر اساس آن، دو روش تنظیم متفاوت پیشنهاد شدهاند: یک مسئله بهینهسازی، در حوزه فرکانس، که شامل نابرابریهای ماتریس درجه دوم غیرمحدب با محدودیت نابرابری ماتریس خطی و بهینهسازی حوزه زمانی سیستم شبیهسازی شده است.
این روش ها جایگزینی برای تنظیم این نوع سیستم هستند که فرآیند را به سمت بهترین سناریوی عملیاتی هدایت می کند که ثبات، استحکام و اقدامات کنترلی محدود را ارائه می دهد.
توضیحات پروژه تنظیم MIMO PID برای سیستمهای فاز غیرمینیمم
شبیه سازی این مقاله در یک ام فایل انجام شده است و گزارش شبیه سازی نیز 2 صفحه است که کد متلب در آن قرار گرفته و هر بخش به صورت کلی توضیح داده شده است.
نتایج بدست آمده از شبیه سازی با متلب:
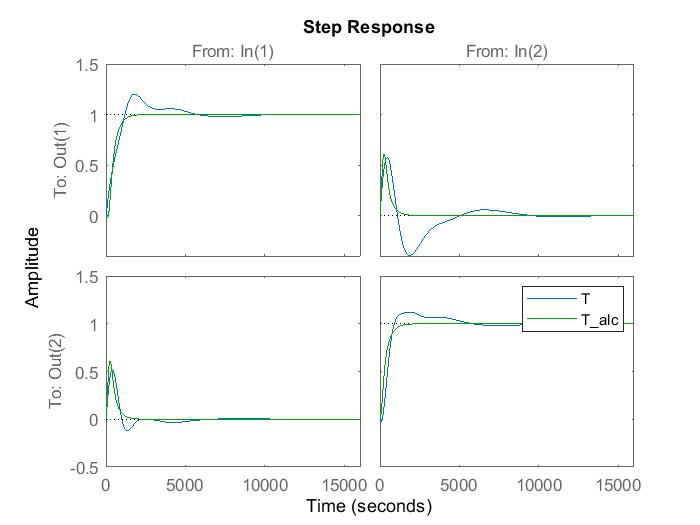
Fig.3. Estimated attainable trajectory (?alc) and trajectory
achievable by the system (?) for the consideration (i)
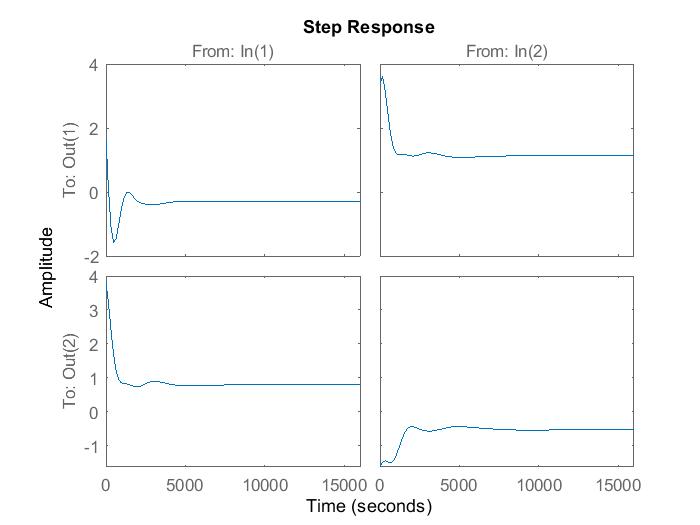
Fig. 4. Step Response of the Q-function for the consideration (i)
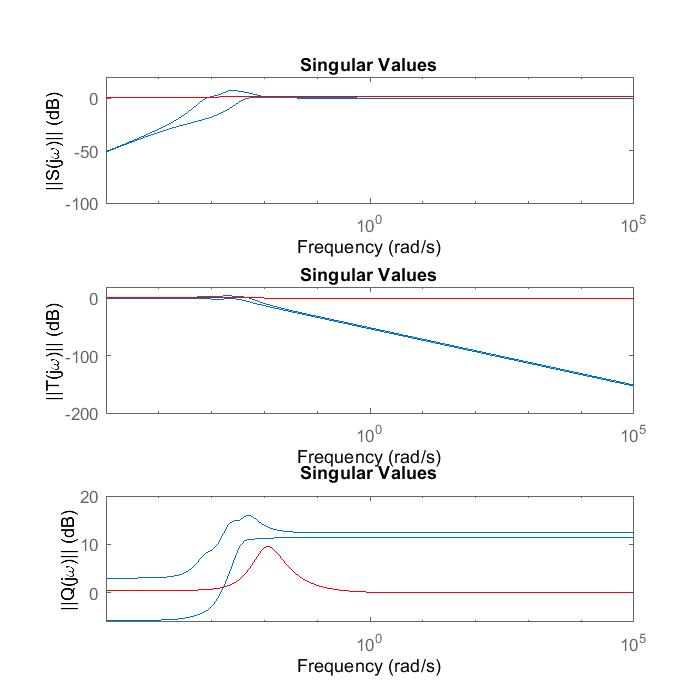
Fig. 5. Closed-loop transfer function singular values (blue line) and constraints (red line) for the consideration (i).
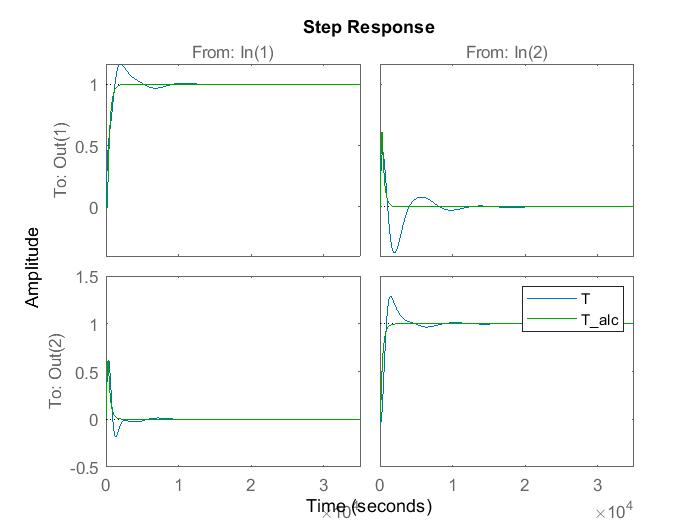
Fig. 6. Estimated attainable trajectory (?alc) and trajectory achievable by the system (?) for the consideration (ii)
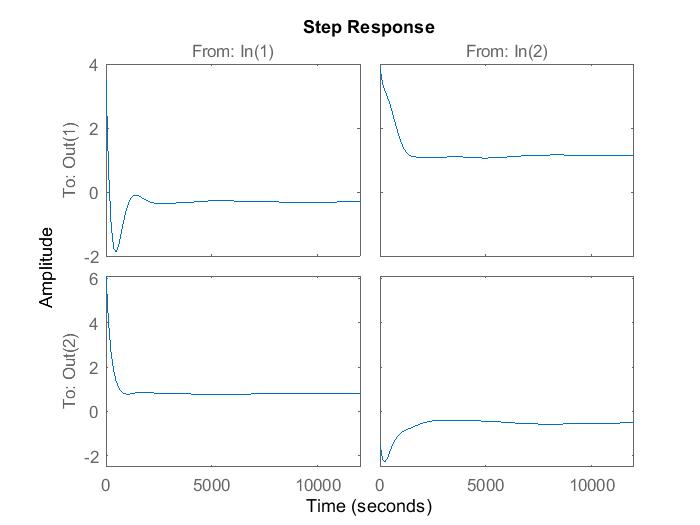
Fig. 7. Step Response of the Q-function for the consideration(ii)

Fig. 8. Closed-loop transfer function singular values (blue line) and constraints (red line) for the consideration (ii)

Fig. 9. Estimated attainable trajectory (?alc) and trajectory achievable by the system (?) for the time domain
optimization of the simulated system
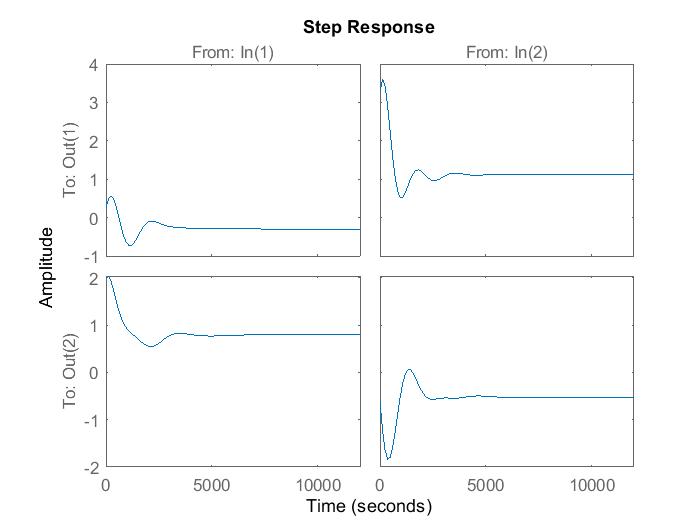
Fig. 10. Step Response of the Q-function for the time domain optimization of the simulated system
شاید به موارد زیر نیز علاقه مند باشید:
- یک روش طراحی کنترل کننده خطی MIMO برای بهینه سازی مقاوم و درجه دوم
- تنظیم خوکار, کنترل کننده PID گسسته برای مبدل dc-dc برای پاسخ سریع گذرا
- کنترل فازی پایدار برای سیستم های غیرخطی MIMO
- همگرایی پارامتری و کنترل سیستم آشوب با استفاده از خطی سازی فیدبک تطبیقی
کلیدواژه:
نابرابری های ماتریس درجه دوم, رفتار فاز غیر حداقل
تنظیم MIMO PID برای سیستمهای فاز غیرمینیمم: تعیین محدودیتهای قابل دستیابی برای یک رفتار پایدار با متلب
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.