توضیحات
Lyapunov-based adaptive model predictive control for unconstrained non-linear systems with parametric uncertainties
فایل های زیر تهیه شده است:
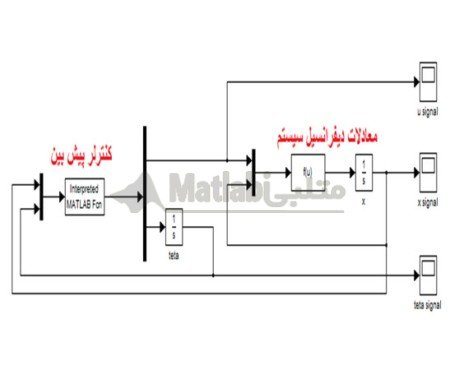
1- فایل سیمولینک Example1.mdl که مثال اول مقاله را پیاده سازی میکند.
2- فایل MPC1.m که کنترلر مقاله را برای مثال اول پیاده سازی میکند.
3- فایل OBJ_Example1.m که تابع هزینه مثال اول را پیاده سازی میکند.
4- فایل Example1_Const.m که قیدهای مثال اول را پیاده سازی میکند.
5- فایل سیمولینک Example2.mdl که مثال اول مقاله را پیاده سازی میکند.
6- فایل MPC2.m که کنترلر مقاله را برای مثال اول پیاده سازی میکند.
7- فایل OBJ_Example2.m که تابع هزینه مثال اول را پیاده سازی میکند.
8- فایل Example2_Const.m که قیدهای مثال اول را پیاده سازی میکند.
فایلهای در متلب نسخه 2011b آماده شده است. جهت اجرا از فیلم آموزشی موجود در فولدر گزارش می توان استفاده کرد.
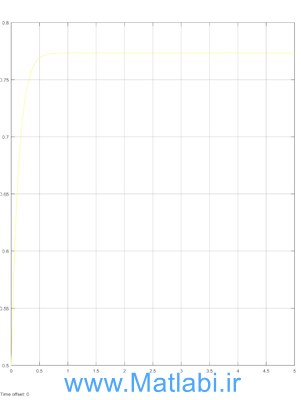
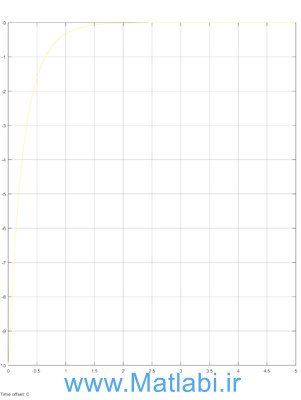
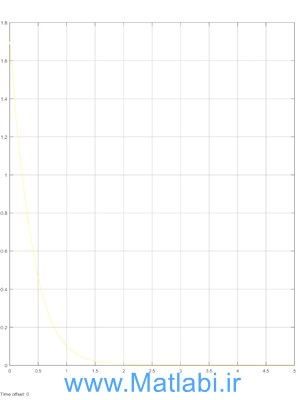
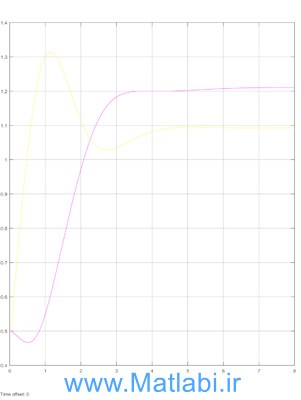
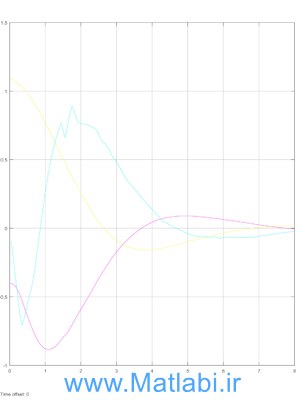
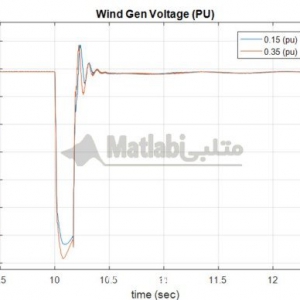
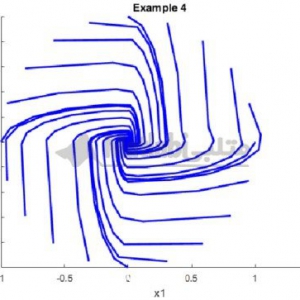
نتایج بدست آمده از شبیه سازی:

کلید واژه:پروژه متلب,شبیه سازی بامتلب
uncertain systems, adaptive control, closed loop systems, control system synthesis, Lyapunov methods, nonlinear control systems, predictive control, stability
شبیه سازی مقاله Lyapunov-based adaptive model predictive control for unconstrained non-linear systems with parametric uncertainties
توسط کارشناسان سایت متلبی پیاده سازی گردیده و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،. با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.