
توضیحات
LQR self-adjusting based control for the planar double inverted pendulum
پروژه کنترل مدرن
کنترل کنیم معادلات Lqr دو ورودی و دو خروجی داده شده است که می خواهیم آن را به صورت بهینه با کنترلر Mimo در این مقاله یک سیستم
سیستم به صورت زیر است:
…
بدست می آوریم:X ,y معادلات بازوی ربات را برای دو محور
…
تحلیل حلقه باز سیستم به صورت زیر است:
پاسخ پله برای سیستم بالا را در شکل زیر رسم می کنیم:
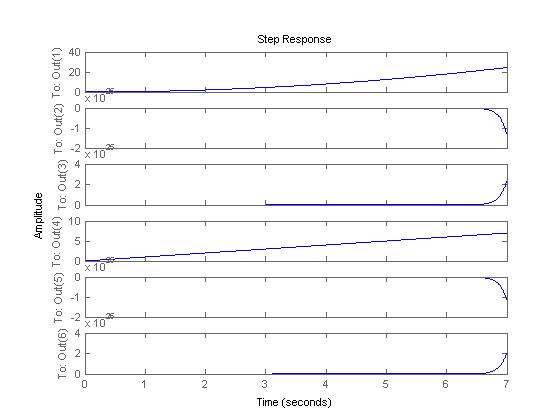
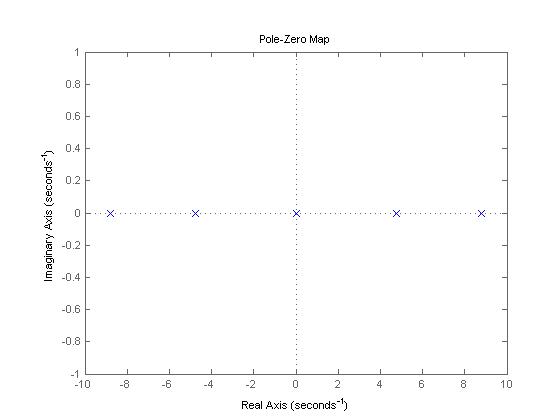
همانطور که ملاحظه می شود پاسخ های سیستم ناپایدار و نا مینیمم فاز است آرایش صفر و قطب های سیستم به صورت زیر است:
برای سیستم زیر کنترل پذیری را بررسی می کنیم:
…
ans =
2
انجام پروژه متلب و شبیه سازی رویت پذیری و کنترل پذیری سیستم با متلب توسط متخصصین حرفه ای و متعهد سایت متلبی
همانطور که ملاحظه می شود ماتریس کنترل پذیر فول رنک نبوده بنابراین کنترل این سیستم مشکل است:
:Lqr برنامه برای کنترل پذیری
…

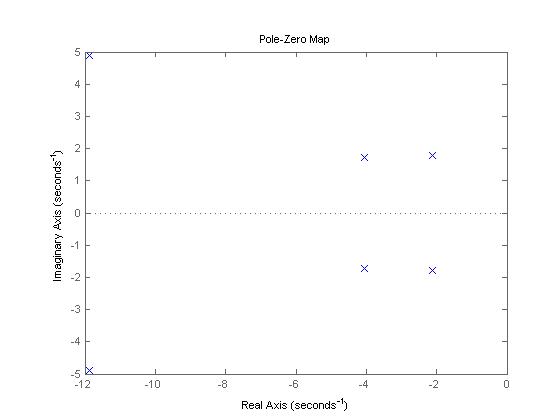
خروجی های سیستم با توجه به اینکه سیستم ناپایدار و کنترل نا پذیر بود ولی به خوبی کنترل شد.
ریشه های سیستم جدید به صورت زیر در می آید:
…
در گزارش فوق بعضی از بخش های گزارش اصلی حذف شده اند.
کلیدواژه:
کنترل LQR, پاندول معکوس, پروژه متلب, پروژه matlab , شبیه سازی با متلب
Planar double inverted pendulum, LQR self-adjusting, optimize factor
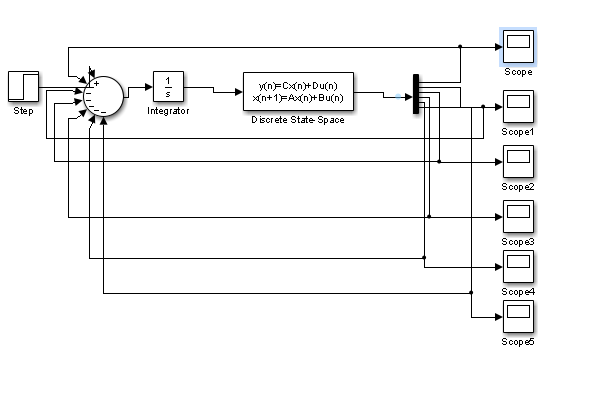
شبیه سازی
LQR self-adjusting based control for the planar double inverted pendulum
پروژه درس کنترل مدرن به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.





