توضیحات
کنترل فرکانس بار برای سیستم قدرت به هم پیوسته چند منبع با دو ناحیه توسط کنترل کننده های هوشمند
عنوان اصلی مقاله:
Load Frequency Control for Two-area Multi-Source Interconnected Power System using Intelligent Controllers
شبیه سازی مقاله در محیط ام فایل و سیمولینک متلب انجام شده است.
دارای گزارش ورد 20 صفحه ای می باشد.
توضیحات پروژه
مقدمه:
در این گزارش نتایج شبیه سازی مقاله کنترل فرکانس بار (LFC) برای سیستم قدرت به هم پیوسته چند منبع با دو ناحیه توسط کنترل کننده های هوشمند توسط نرم افزار MATLAB R2016a ارائه میگردد. بهره های کنترل کننده با استفاده از روش متداول، الگوریتم های ژنتیک (GA) و خفاش (BA) بهینه شده اند و تحقیقی بر روی بهترین روش بهینه سازی بر اساس عملکرد دینامیکی و پایداری مدل سیستم قدرت انجام شده است. مدل سیستم قدرت تحت مطالعه دو ناحیه هر یک شامل نیروگاه حرارتی، آبی و توربین بادی مبتنی بر ژنراتور دوسوتغذیه (DFIG) با ضریب مشارکت مختلف در تولید کل برای ناحیه مربوطه می باشد. در این مقاله مشاهده شده است که بهبود قابل قبولی در عملکرد دینامیکی سیستم توسط الگوریتم خفاش برای کنترل کننده فرکانس بار برای مدل سیستم قدرت چند منبعی در مقایسه با روش متداول و الگوریتم ژنتیک حاصل شده است.
الگوریتم ژنتیک
LFC متداول بعلت تعداد قیود سیستمی مانند افزایش ابعاد، ترکیب منابع انرژی تجدیدپذیر، تغییر ساختار سیستم و عدم قطعیت پارامتری، مشکلاتی در پیاده سازی در سیستمهای قدرت مدرن را شامل میشود. اغلب روشهای LFC متداول کنترل کننده های مبتنی بر مدل را فراهم میکنند که برای استفاده در سیستم های قدرت مقیاس بزرگ شامل عوامل غیرخطی مثل اثرات گاورنر، قیود نرخ تولید (GRC) و عدم قطعیت پارامتری دشوار هستند. برای غلبه بر محدودیتهای کنترل کننده های متداول، طرحهای LFC هوشمند پیاده سازی شده اند که انعطافپذیرتر هستند و نتایج مطلوبی ارائه می کنند.
الگوریتمهای ژنتیک (GA) یک روش جستجوی کلی تصادفی است که از فرآیند تکامل طبیعی تقلید میکند. الگوریتم ژنتیک بدون دانشی در رابطه با جواب بهینه مقداردهی میشود و بطور کلی به پاسخهای عملگرهای تکاملی اش برای رسیدن به بهترین جواب وابسته است. این الگوریتم در چندین نقطه مستقل شروع میشود جستجوی موازی انجام میدهد، نقاط بهینه محلی را رد میکند و در نهایت به یک جواب بهینه همگرا میشود. الگوریتم ژنتیک دارای سه تابع اصلی برای دستیابی به یک جواب بهینه بصورت زیر است:
تولید نسل: تولید نسل، کروموزوم تولید میکند و برازندگی هر فرد ارزیابی میشود. این مقدار برازندگی برای انتخاب بهترین فرد تولید نسل استفاده میشود.
تقاطع: تقاطع امکان تبادل اطلاعات بین افراد در جمعیت را فراهم میکند، دو رشته والد برای تولید رشته فرزند جدید انتخاب میشوند.
جهش: جهش یک اصلاح تصادفی موقعیت بیتها در یک رشته برای ایجاد تنوع در رشته است بطوریکه GA کل فضای مسأله را جستجو میکند. این عملگر یک عملگر پسزمینه در الگوریتم ژنتیک است و احتمال جهش بطور عادی کم است زیرا یک نرخ جهش بالا رشتههای ارزیابی را خراب خواهد کرد و الگوریتم ژنتیک را به جستجو در فضای تصادفی وادار میکند. این عملگر فرآیند تکاملی را به سمت نواحی امیدبخش فضای جستجو هدایت میکند. عملگر جهش برای جلوگیری از همگرایی زودرس به بهینه محلی با نمونهبرداری تصادفی نقاط جدید در فضای جستجو معرفی شده است. این عملگر با چرخش بیتها بطور تصادفی با احتمال کم اجرا میشود و در نهایت شرط توقف که ممکن است بصورت تعداد حداکثر ثابت نسلها یا رسیدن به سطح قابل قبولی از برازندگی، محقق شود. روند نمای اصلی تنظیم رگولاتورهای LFC مبتنی بر ساختار PID با استفاده بهینه سازی الگوریتم ژنتیک در شکل 1گزارش کار نشان داده شده است.
الگوریتم خفاش
تکنیکهای بهینه سازی الهام گرفته از طبیعت نقشی حیاتی در عملکرد سیستم در مقایسه با روش متداول ایفا میکنند. یک الگوریتم فرا ابتکاری جدید بر اساس رفتار صداشناسی خفاش ها بطور موفقیت آمیزی برای بهینه سازی توابع ریاضی پیوسته، کاربردهای صنعتی و میکروالکترونیک بکار گرفته شده است. رفتار صداشناسی خفاشها دارای قابلیت شکار طعمه و تشخیص انواع حشرات در تاریکی مطلق است. چنین رفتاری میتواند بطور ریاضی برای بهینه سازی مسأله مهندسی پیچیده فرمولبندی شود. اگرچه تقریب و فرضیاتی برای فرمولبندی الگوریتم در نظر گرفته میشود. بواسطه رفتار صداشناسی، خفاشها تفاوت بین مواد غذایی و غیر غذایی را تشخیص میدهند. در طول شکار، مشخصه های انعکاس صدا مثل فرکانس، طول موج، بلندی صدا، انتشار پالس، تغییرات دامنه در ترکیب با سرعت خفاشها، موقعیتهای تصادفی به شناسایی هدف کمک میکنند.
مدل سیستم قدرت
یک سیستم قدرت به هم پیوسته چند ناحیهای با چند منبع برای مطالعه موردی LFC در نظر گرفته شده است. هر دو ناحیه مشخص هستند و توان الکتریکی با نیروگاههای حرارتی با توربین بازگرمکن (ریهیتدار)، واحد توربین بادی مبتنی بر DFIG برای برآورده کردن تقاضای ناحیه مربوطه تولید میشود. یک مدل سیستم قدرت دو ناحیهای با چند منبع در شکل 3 نشان داده شده است. نیروگاه حرارتی بسته به تعداد شفتهای موجود در توربین، شامل توربین بخار و یا ساختار ترکیبی پشت به پشت یا ترکیبی متقابل میباشد. متداولترین ساختار ترکیبی پشت به پشت مورد استفاده قرار گرفته است و میتواند چرخه بخار ریهیتدار یا بدون ریهیت باشد. سیستم گاورنر توربین بخار میتواند هیدرولیکی-مکانیکی، هیدرولیکی الکتریکی یا الکتروهیدرولیکی دیجیتالی باشد. برای مطالعات دینامیکی یک سیستم گاورنر توربین بخار میتواند با تابع تبدیل مرتبه اول با یک ثابت زمانی ارائه شود. خروجی توان از توربین از طریق موقعیت شیرهای کنترل کنترل میشود که جریان بخار توربینها را کنترل میکند. مدل ریاضی اختلال یافته نیروگاه حرارتی با گاورنر سرعت بصورت کنترلکننده اولیه ارائه شده در [4] شامل مجموعه ژنراتور توربین بخار بدون ریهیت برای تولید انرژی الکتریکی برای سیستم قدرت میباشد.
در گزارش اصلی فرمولبندی و توضیحات بیشتری از مسئله و مدلسازی آن داده شده است.
شبیه سازی با متلب
در این بخش نتایج شبیه سازی سیستم مورد مطالعه میشود. عملکرد الگوریتمها با یکدیگر بر اساس کمینه سازی شاخص عملکرد مقایسه میشوند.
برای مدل سیستم قدرت توسعه یافته، بهرههای رگولاتورهای LFC توسط تکنیک متداول، الگوریتم ژنتیک و خفاش تنظیم میشوند.
شکل 5 همگرایی روشهای بهینهسازی GA و BA را نشان میدهد. انجام پروژه متلب را به متخصصین متلبی بسپارید.
از این شکل میتوان به وضوح مشاهده نمود که روش بهینهسازی خفاش در مقایسه با الگوریتم ژنتیک سرعت همگرایی بیشتری دارد همچنین مقدار بهینه تابع هدف در تکرار نهایی برای BA کمتر از GA است.
بهره های بهینه و شاخص عملکرد در جدول 1 نشان داده شده اند. پاسخهای دینامیکی سیستم قدرت با رگولاتورهای LFC بهینه برای اختلال 1% در شکلهای 6-17 نشان داده شده اند.
از نمودارهای پاسخ دینامیکی واضح است که اغتشاش بار دارای غلبه محلی است و حالتهای سیستم بیشتر تحت تأثیر ناحیه اغتشاش در مقایسه با ناحیه کنترلی به هم پیوسته می باشد.
برای سیستم قدرت برای اغتشاش بار 1% در ناحیه 1 سیستم قدرت به هم پیوسته چند منبعی که در شکل 6 نشان داده شده است مشاهده میشود که کمترین نوسانات برای الگوریتم خفاش، پس از آن الگوریتم ژنتیک بدست آمده است. قبل از اینکه سیستم به حالت ماندگار برسد، پاسخ کمی نوسانی است.
اگرچه نوسانات بعلت حضور اینرسی آب در گاورنر نیروگاه آبی و دینامیکهای توربین بادی DFIG میباشند. کنترل کننده تنظیم شده با الگوریتم خفاش نوسانات را کاهش میدهد.
همچنین زمان نشست برای دستیابی به شرایط حالت ماندگار را در مقایسه با کنترل کننده های LFC تنظیم شده با GA و متداول بهبود میدهد. از جدول 1 واضح است که تابع هزینه نیز در حالت الگوریتم خفاش بهبود یافته است که دینامیکهای سیستم قدرت کلی را در مقایسه با کنترل کننده های تنظیم شده با GA و متداول بهبود میبخشد.
از شکل 7 روند مشابهی در دینامیکهای ناحیه 2 مشاهده میشود اما با انحراف کمتری در حالتها بعنوان مثال انحراف پیک اول در حالت کنترل کننده های تنظیم شده با GA و BA از نظر دامنه کمتر از ناحیه 1 است، دینامیکهای شارش توان خط اتصال در شکل 8 ارائه شده است. از این شکل میتوان مشاهده نمود که انحراف پیک اول در توان خط در مقایسه با کنترلکننده های تنظیم شده با GA و متداول کمتر است نوسان کمتری دارد و سریعتر نشست میکند.
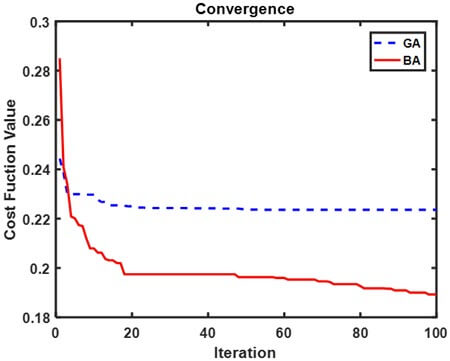
شکل 5) همگرایی روشهای بهینه سازی در نظر گرفته شده
جدول 1) بهره و شاخص عملکرد
|
|
بهره | ||||||
|
روش تنظیم |
Kp1 | Ki1 | Kd1 | Kp2 | Ki2 | Kd2 | ISE |
|
متداول |
1280/1 |
0021/0 | 7444/1 | 1200/1 | 0021/0 | 5424/1 |
9213/0 |
|
GA |
5418/1 |
3329/4 | 5450/3 | 6230/1 | 0 | 6747/1 |
2236/0 |
| BA | 8408/1 | 6978/4 | 4339/3 | 4139/0 | 0 | 8859/4 |
1892/0 |
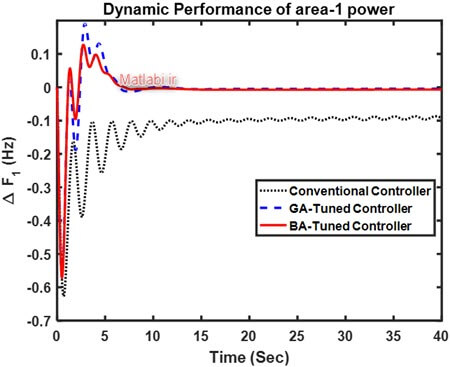
شکل 6) عملکرد دینامیکی ناحیه 1 برای اختلال بار 1% در ناحیه 1
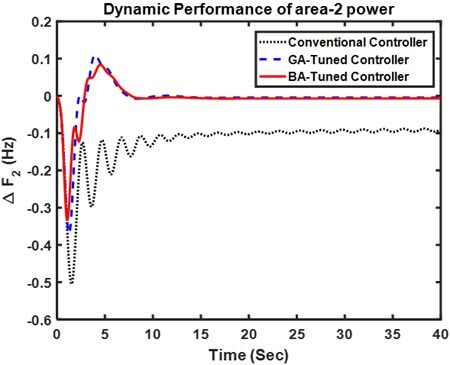
شکل 7) عملکرد دینامیکی ناحیه 2 برای اختلال بار 1% در ناحیه 1
شکل 8) عملکرد دینامیکی توان خطا اتصال برای اختلال بار 1% در ناحیه 1
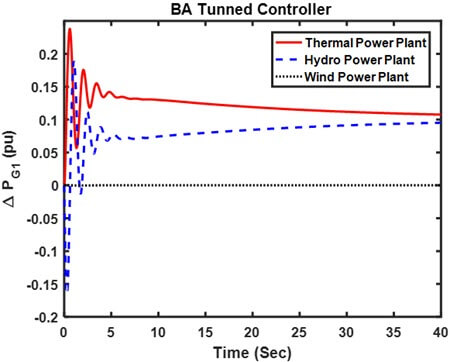
اثر تکنیک تنظیم پیشنهاد شده بر روی منابع مختلف تولید توان به وضوح در شکل های مربوطه قابل مشاهده است.
بعنوان مثال شکل 9 افزایش در تولید توسط نیروگاه حرارتی ناحیه 1 بعد از اغتشاش بار در همان ناحیه را نشان میدهد.
پاسخ رگولاتور LFC نسبتاً مناسب است زیرا سریعتر عمل میکند و برای نرخ تغییرات توان در مقایسه با رگولاتور LFC بهینه شده با GA و متداول سریعتر نشست میکند.
تغییر در تولید توان از نیروگاه آبی در شکل 10 قابل مشاهده است. از پاسخ اولیه واضح است که پاسخ رگولاتور LFC تنظیم شده با BA در مقایسه با رگولاتور تنظیم شده با GA و متداول سریعتر است. علاوه بر این تغییر در تولید توان نیروگاه بادی مبتنی بر DFIG در شکل 11 نشان داده شده است.
بعلت پاسخ مناسب رگولاتور LFC تنظیم شده با الگوریتم خفاش، یک بهبود محسوسی در پیک اورشوت و زمان نشست در مقایسه با رگولاتور تنظیم شده با GA و متداول وجود دارد.
مطالب پیشنهادی:
- پاسخ مبتنی بر ILMI برای تنظیم مقاوم کنترل کننده های PI و PID
- مدلسازی وکنترل توان توربین های بادی سرعت متغیر با کنترلر پیش بین
- تنظیم خوکار, کنترل کننده PID گسسته برای مبدل dc-dc برای پاسخ سریع گذرا
انحراف فرکانس و توان خط اتصال متمایل به صفر است تا زمانیکه تولید از منابع پراکنده برای برآورده کردن تقاضای افزایش یافته افزایش یابد.
پاسخ در تولید توان از منابع پراکنده برای ناحیه پراکنده و به هم متصل با رگولاتور LFC تنظیم شده با GA و متداول در شکلهای 12 تا 17 نشان داده شده است.
در اینجا فقط نمونه ای از نتایج شبیه سازی جهت رویت قبل از خرید قرار داده شده است.
شکل 9) خروجی نیروگاه حرارتی برای اختلال بار 1% در ناحیه 1
شکل 10) خروجی نیروگاه آبی برای اختلال بار 1% در ناحیه 1
شکل 11) خروجی نیروگاه بادی برای اختلال بار 1% در ناحیه 1
شکل 12) تغییر در تولید برای اختلال بار 1% در ناحیه 1 (الگوریتم GA)
شکل 13) تغییر در تولید برای اختلال بار 1% در ناحیه 2 (الگوریتم GA)
شکل 14) تغییر در تولید برای اختلال بار 1% در ناحیه 1 (الگوریتم BA)
شکل 15) تغییر در تولید برای اختلال بار 1% در ناحیه 2 (الگوریتم BA)
شکل 16) تغییر در تولید برای اختلال بار 1% در ناحیه 1 (الگوریتم متداول)

شکل 17) تغییر در تولید برای اختلال بار 1% در ناحیه 2 (الگوریتم متداول)
میتوان به وضوح مشاهده نمود که برای تمام کنترلکنندهها پاسخ نیروگاه حرارتی برای تغییر تولید در مقایسه با نیروگاه آبی برای برآورده کردن تقاضای بار افزایش یافته سریع است از این رو میتوان گفت که رگولاتور LFC تنظیم شده با الگوریتم خفاش دینامیکهای کلی و شرایط حالت ماندگار سیستم قدرت را بهبود می بخشد.
نتیجه گیری
امروزه با افزایش ابعاد و پیچیدگی سیستمهای قدرت LFC مهمتر شده است.
تکنیکهای کنترلی میتوانند برای طراحی طرحهای LFC متمرکز برای این سیستمها برای بهره برداری موفقشان با وجود اختلال بار استفاده شوند.
در این گزارش کنترلکننده LFC تنظیم شده با الگوریتم خفاش برای مدل سیستم قدرت به هم پیوسته با چند منبع دو ناحیهای پیاده سازی و نتایج با کنترلکننده LFC تنظیم شده با GA و متداول مقایسه شد.
تنها ناحیه 1 با 1% افزایش در تقاضای بار مختلل شد و اثر بر روی دینامیکهای سیستم قدرت برای کنترلکننده های فرکانس بار BA، GA و متداول مشاهده شد.
از آنجاییکه اختلال ماهیت غلبه محلی دارد به نواحی غیر مختلل با خط اتصال ضعیف بین ناحیه کنترلی به هم پیوسته انتقال مییابد.
از بررسی نتایج مشاهده شد که عملکرد سیستم بطور قابل ملاحظه ای با کنترلکننده فرکانس بار تنظیم شده با الگوریتم خفاش در مقایسه با کنترلکننده فرکانس بار تنظیم شده با GA و متداول بهبود می یابد.
شاخصهای عملکرد کنترلکننده بار نیز بطور قابل ملاحظه ای در حالت بهرههای بهینه بدست آمده توسط روش الگوریتم خفاش بهبود می یابند.
کلیدواژه:
کنترل فرکانس بار, الگوریتم خفاش, توربین بادی DFIG, الگوریتم ژنتیک, سیستم برق به هم پیوسته چند منبع
| Load frequency control, bat algorithm, DFIG wind turbine, genetic algorithm, multi-source interconnected power system |
شبیه سازی کنترل فرکانس بار برای سیستم قدرت به هم پیوسته چند منبع با دو ناحیه توسط کنترل کننده های هوشمند
طبق توضیحات فوق توسط کارشناسان سایت متلبی تهیه شده است و به تعداد محدودی قابل فروش می باشد.
سفارش انجام پروژه مشابه
درصورتیکه این محصول دقیقا مطابق خواسته شما نمی باشد،.
با کلیک بر روی کلید زیر پروژه دلخواه خود را سفارش دهید.


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.